
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2026-01-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.0.8 |
README
swri_console
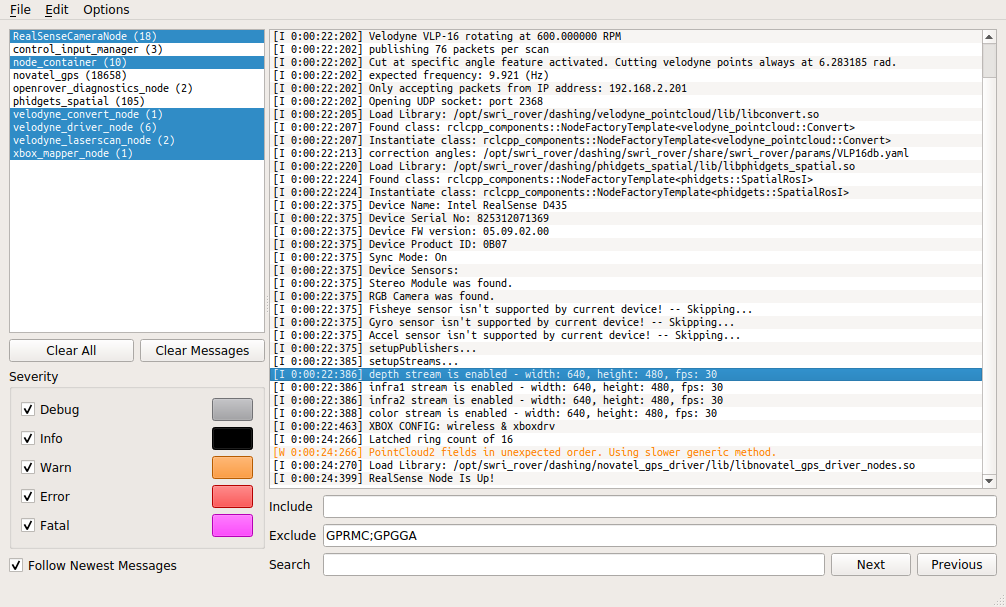
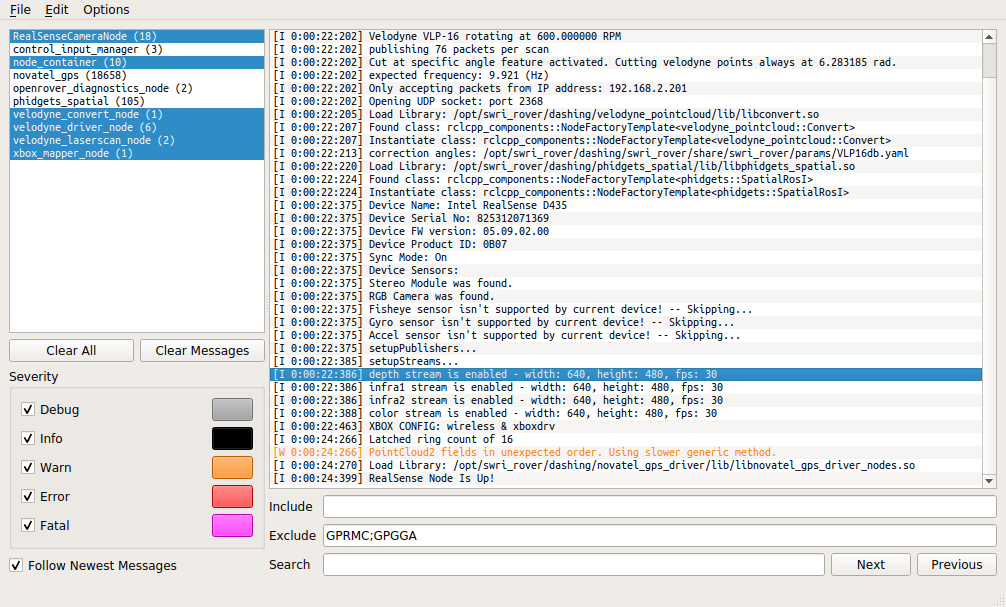
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. Currently, humble and jazzy builds are bloomed from the jazzy branch, and kilted and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2026-01-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.0.8 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. Currently, humble and jazzy builds are bloomed from the jazzy branch, and kilted and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-02-09 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.1.2 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-02-09 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.1.2 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2026-01-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.0.8 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. Currently, humble and jazzy builds are bloomed from the jazzy branch, and kilted and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2026-01-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.0.8 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. Currently, humble and jazzy builds are bloomed from the jazzy branch, and kilted and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2026-01-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.0.8 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. Currently, humble and jazzy builds are bloomed from the jazzy branch, and kilted and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2026-01-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.0.8 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. Currently, humble and jazzy builds are bloomed from the jazzy branch, and kilted and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2026-01-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.0.8 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. Currently, humble and jazzy builds are bloomed from the jazzy branch, and kilted and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-02-09 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.1.2 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-02-09 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.1.2 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2026-02-09 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.1.2 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. As of v2.1.2, humble, jazzy, kilted, and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 1.1.1 |
README
swri_console
| master | dashing-devel |
|---|---|
 |
 |
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 1.1.1 |
README
swri_console
| master | dashing-devel |
|---|---|
|
|
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 1.1.1 |
README
swri_console
| master | dashing-devel |
|---|---|
|
|
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2026-01-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 2.0.8 |
README
swri_console
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file - Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
Supported ROS Distributions
The package currently supports all ROS 2 distributions up to rolling. Branches marked *-eol indicate a distribution that is at end of life status and is no longer updated. Currently, humble and jazzy builds are bloomed from the jazzy branch, and kilted and rolling releases are bloomed from the ros2-devel branch.
Build Status
| Humble | Jazzy | Kilted | Rolling |
| :—- | :—- | :—- | :—— |
| |
|
|
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 1.1.1 |
README
swri_console
| master | dashing-devel |
|---|---|
|
|
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 1.1.1 |
README
swri_console
| master | dashing-devel |
|---|---|
|
|
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/swri_console.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swri_console | 1.1.1 |
README
swri_console
| master | dashing-devel |
|---|---|
|
|
swri_console is an alternative to rqt_console for viewing the ROS console output. swri_console was written to scale well to large systems with heavy console output. It stays responsive under fire and allows users to quickly find information to track down problems.
Installation
The master branch compiles and runs on ROS Kinetic and Melodic; the dashing-devel branch compiles and runs on ROS 2 Dashing and Eloquent.
To install a binary release:
sudo apt install ros-${ROSDISTRO}-swri-console
Usage
ROS 1:
rosrun swri_console swri_console
ROS 2:
ros2 run swri_console swri_console
Features
- High performance; swri_console handles receiving thousands of logs per second and storing millions in memory while staying responsive
- Ctrl or shift-click to quickly select which nodes you want to monitor
- Hide or show log messages based on substring matches, or, if you need more power, regular expressions
- Hide, show, and colorize log messages based on severity
- Save and load log messages to text files
- Save and load log messages directly from the
/rosouttopic in a bag file- Not supported in ROS 2 yet
- Right-click on nodes to dynamically set their logger levels
- Not supported in ROS 2 yet