
Repository Summary
| Checkout URI | https://github.com/felixendres/rgbdslam_v2.git |
| VCS Type | git |
| VCS Version | indigo |
| Last Updated | 2023-07-18 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rgbdslam | 0.2.0 |
README
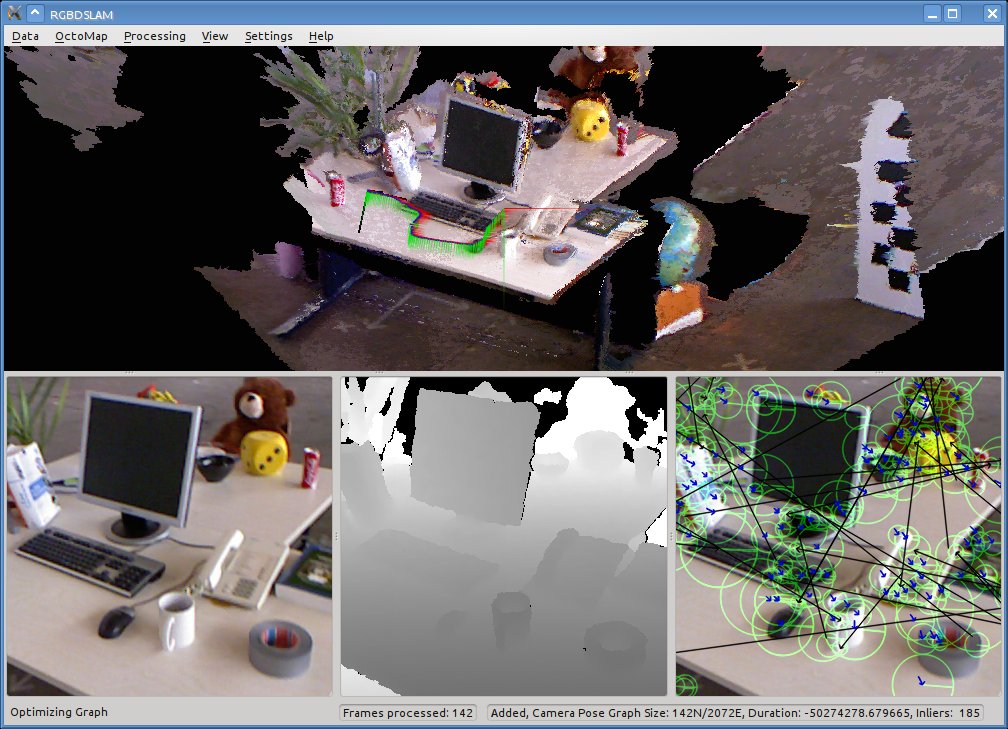
RGBDSLAMv2
… is a state-of-the-art SLAM system for RGB-D cameras, e.g., the Microsoft Kinect or the Asus Xtion Pro Live. You can use it to create 3D point clouds or OctoMaps.
RGBDSLAMv2 is based on the open source projects, ROS, OpenCV, OpenGL, PCL, OctoMap, SiftGPU, g2o, and more - Thanks!
A journal article with a system description and performance evaluation can be found in the following publication:
“3D Mapping with an RGB-D Camera”,
F. Endres, J. Hess, J. Sturm, D. Cremers, W. Burgard,
IEEE Transactions on Robotics, 2014.
Additional information can be found here:
- www.informatik.uni-freiburg.de/~endres
- http://www.ros.org/wiki/rgbdslam
- http://answers.ros.org/questions/tags:rgbdslam
Prerequisites
- Ubuntu 14.04
- ROS indigo
Installation
-
Put RGBDSLAMv2 in a catkin workspace: See the catkin tutorial for details. Use git to clone this repository into your workspace’s “src/” directory. Or download RGBDSLAMv2 as an archive and extract it to “src/”.
-
Use rosdep (i.e. “rosdep install rgbdslam”) to install missing dependencies. For details see http://wiki.ros.org/ROS/Tutorials/rosdep
-
To build RGBDSLAMv2 go to your catkin workspace and execute “catkin_make”. If you get an error about the missing siftgpu library, execute “catkin_make” again.
##Installation from Scratch ##################################################### This walkthrough is is hardly tested, so watch out for problems. Assuming you have installed ROS indigo on Ubuntu 14.04, issue the following commands in a terminal (copy-paste should work)
#Prepare Workspace
source /opt/ros/indigo/setup.bash
mkdir -p ~/rgbdslam_catkin_ws/src
cd ~/rgbdslam_catkin_ws/src
catkin_init_workspace
cd ~/rgbdslam_catkin_ws/
catkin_make
source devel/setup.bash
#Get RGBDSLAM
cd ~/rgbdslam_catkin_ws/src
wget -q http://github.com/felixendres/rgbdslam_v2/archive/indigo.zip
unzip -q indigo.zip
cd ~/rgbdslam_catkin_ws/
#Install
rosdep update
rosdep install rgbdslam
catkin_make
Installation done! What’s next?
See the sections below for more details on the usage. But to get you started quickly here’s the most important pointers:
-
If you want to use RGBDSLAMv2 with an RGB-D camera you may have to install openni (sudo apt-get install ros-indigo-openni-launch).
-
Check out the launch files in “launch/” for examples and specific use cases. roslaunch rgbdslam openni+rgbdslam.launch is a good starting point for live mapping.
-
Check out the README in “test/” for running, testing and evaluating RGBDSLAMv2 on Juergen Sturm’s RGB-D SLAM Dataset and Benchmark: http://vision.in.tum.de/data/datasets/rgbd-dataset You need cython for the evaluation scripts (sudo apt-get install cython).
-
If you want to use SURF or SIFT, you will need to build OpenCV from source, including the non-free module (this does not include SIFTGPU, which is included, but needs to be enabled in CMakeLists.txt). In the CMakeLists.txt of RGBDSLAMv2 you can set the build directory of OpenCV and enable the non-free functionality. Note that SIFT and SURF are not the best choice. Due to new (software) features in RGBDSLAMv2, ORB outperforms both.
IMPORTANT NOTE
This software is an update of the ROS Fuerte version of RGBDSLAM. However many things have changed, so some of the DOCUMENTATION BELOW MAY BE OUTDATED. Please report problems with the documentation. Thanks.
Configuration
There are several example launch-files that set the parameters of RGB-D SLAM for certain use cases. For a definitive list of all settings and their default settings have a look at their quite readable definition in src/parameter_server.cpp or (with the current settings instead of the default) in the GUI Menu Settings->View Current Settings.
File truncated at 100 lines see the full file