
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
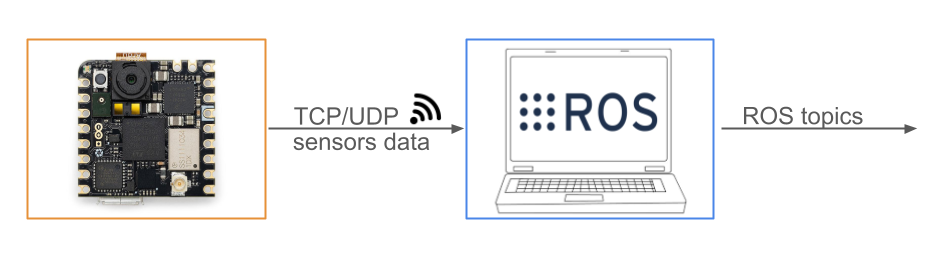
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
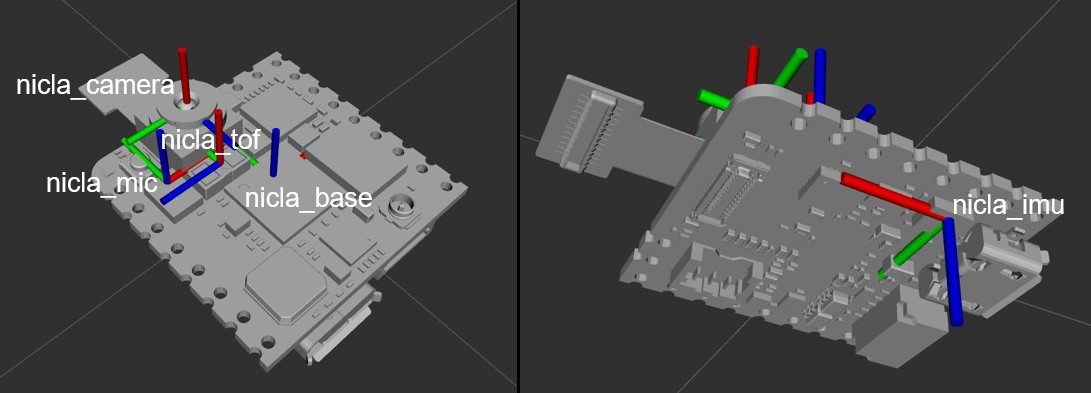
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.1.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
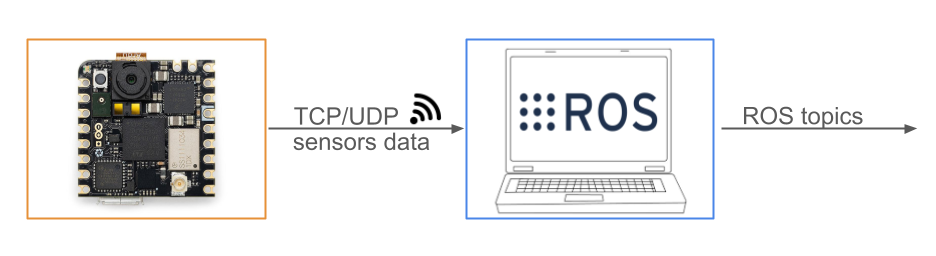
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
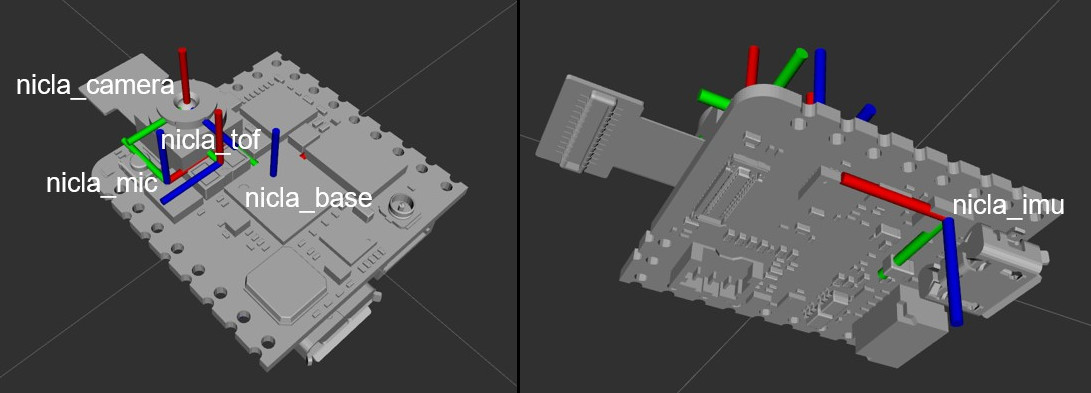
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.
Repository Summary
| Checkout URI | https://github.com/ADVRHumanoids/nicla_vision_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| nicla_vision_ros2 | 1.0.1 |
README
:rocket: Nicla Vision ROS2 package :rocket:
A ROS2 interface for the Arduino Nicla Vision board
Description
This ROS package enables the Arduino Nicla Vision board to be ready-to-use in the ROS world! :boom:
The implemented architecture is described in the above image: the Arduino Nicla Vision board streams the sensors data to a ROS-running machine through TCP/UDP socket. This package will be running on the ROS-running machine, allowing to deserialize the received info, and stream it in the corresponding ROS topics
Here a list of the available sensors with their respective ROS topics:
-
2MP color camera streams on
/nicla/camera/camera_info/nicla/camera/image_raw/nicla/camera/image_raw/compressed
-
Time-of-Flight (distance) sensor streams on:
/nicla/tof
-
Microphone streams on:
/nicla/audio/nicla/audio_info/nicla/audio_stamped
-
Imu streams on:
/nicla/imu
The user can easily configure this package, by launch parameters, to receive sensors data via either UDP or TCP socket connections, specifying also the socket IP address. Moreover, the user can decide which sensor to be streamed within the ROS environment. In this repository you can find the Python code optimised for receiving the data by the board, and subsequently publishing it through ROS topics.
Table of Contents
Installation
Step-by-step instructions on how to get the ROS package running (tested on ROS Noetic).
$ cd <your_workpace>/src
$ git clone https://github.com/ADVRHumanoids/nicla_vision_ros2.git
$ cd <your_workpace>
$ colcon build
$ source <your_workpace>/devel/setup.bash
Note
We rely on the audio_common_msgs for the microphone data. Nevertheless, such package is not available as binary for ros2 yet. Hence, for now, we have copy-pasted the messages in this repo itself.
Additional Note: binary package will be released soon for ROS2!
Usage
Follow the below two steps for enjoying your Arduino Nicla Vision board with ROS2!
1. Run the ROS2 package
- Launch the package:
$ ros2 launch nicla_vision_ros2 nicla_receiver.launch receiver_ip:="x.x.x.x" connection_type:="tcp/udp" <optional arguments>
- Set the `receiver_ip` with the IP address of your ROS-running machine.
You can get this IP address by executing the following command:
$ ifconfig
and taking the "inet" address under the "enp" voice.
- Set the socket type to be used, either TCP or UDP (`connection_type:="tcp"` or `"udp"`).
Furthermore, using the `<optional arguments>`, you can decide:
- which sensor to be streamed in ROS2
(e.g. `enable_imu:=true enable_range:=true enable_audio:=true enable_audio_stamped:=false enable_camera_compressed:=true enable_camera_raw:=true`), and
- on which socket port (default `receiver_port:=8002`).
Once you run it, you will be ready for receiving the sensors data transmitted by the board, so now you can move ahead to point **[2. Arduino Nicla Vision setup](#2-arduino-nicla-vision-setup)**.
- For simulating the Arduino Nicla Vision in Gazebo and Rviz:
$ ros2 launch nicla_vision_ros2 nicla_sim.launch.py <optional arguments>
Using the `<optional arguments>`, you can decide if to run the simulation in Gazebo or in Rviz, and which sensor to simulate (everything set to true as default).
2. Arduino Nicla Vision setup
After having completed the setup steps in the Nicla Vision Drivers repository, just turn on your Arduino Nicla Vision. When you power on your Arduino Nicla Vision, it will automatically connect to the network and it will start streaming to your ROS-running machine.
Note: Look at the LED of your board! The first seconds (about 15 sec) after having turned it on, the LED should be Blue. When the board is correctly connected and it is streaming, the LED will turn off. If you are having connection issues, the LED will be Blue again. If during execution you see a Green LED, it is for unforseen errors. If during execution you see a Red LED, it is for memory errors (usually picture quality too high).
Video Demonstration
https://github.com/ADVRHumanoids/nicla_vision_ros/assets/26459008/a3eaf921-02ea-4482-80a0-5830a338eb74
File truncated at 100 lines see the full file
CONTRIBUTING
Any contribution that you make to this repository will be under the Apache 2 License, as dictated by that license:
5. Submission of Contributions. Unless You explicitly state otherwise,
any Contribution intentionally submitted for inclusion in the Work
by You to the Licensor shall be under the terms and conditions of
this License, without any additional terms or conditions.
Notwithstanding the above, nothing herein shall supersede or modify
the terms of any separate license agreement you may have executed
with Licensor regarding such Contributions.