
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
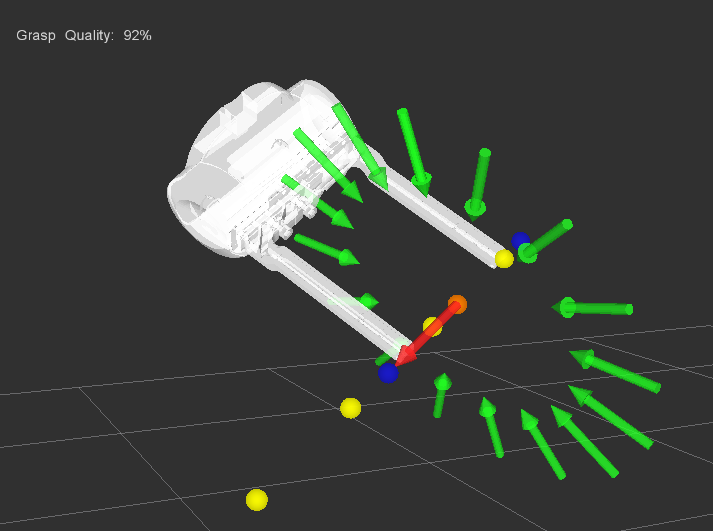
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status

Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2015-07-09 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.1.0 |
README
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::VisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::VisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
// Load grasp data specific to our robot
ros::NodeHandle nh("~");
if (!grasp_data_.loadRobotGraspData(nh, "left_hand"))
ros::shutdown();
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/davetcoleman/moveit_simple_grasps.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-10-31 |
| Dev Status | END-OF-LIFE |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| moveit_simple_grasps | 1.3.1 |
README
SUPPORT FOR THIS PACKAGE HAS ENDED
Sorry, too many things to maintain. I’ll still merge PRs and am happy to share maintainership of this package with someone interested.
MoveIt! Simple Grasps
A basic grasp generator for simple objects such as blocks or cylinders for use with the MoveIt! pick and place pipeline. Does not consider friction cones or other dynamics.
Its current implementation simple takes as input a pose vector (postition and orientation) and generates a large number of potential grasp approaches and directions. Also includes a grasp filter for removing kinematically infeasible grasps via threaded IK solvers.
This package includes:
- Simple pose-based grasp generator for a block
- Separate grasp generators for custom objects such as rectanguar or cylindrical objects
- Grasp filter
- Test code and visualizations
Developed by Dave Coleman at the Correll Robotics Lab, University of Colorado Boulder with outside contributors.
Video Demo
A simple demo with Baxter:
Build Status
Install
Ubuntu Debian
Hydro:
sudo apt-get install ros-hydro-moveit-simple-grasps
Indigo:
sudo apt-get install ros-indigo-moveit-simple-grasps
Install From Source
Clone this repository into a catkin workspace, then use the rosdep install tool to automatically download its dependencies. Depending on your current version of ROS, use:
Hydro:
rosdep install --from-paths src --ignore-src --rosdistro hydro
Indigo:
rosdep install --from-paths src --ignore-src --rosdistro indigo
Robot-Agnostic Configuration
You will first need a configuration file that described your robot’s end effector geometry. Currently an example format can be seen in this repository at config/baxter_grasp_data.yaml. See the comments within that file for explanations.
To load that file at launch, you copy the example in the file launch/grasp_test.launch where you should see the line <rosparam command="load" file="$(find moveit_simple_grasps)/config/baxter_grasp_data.yaml"/>.
Code Usage
Note: You might find the moveit_blocks.h example, discussed at the bottom of this page, most helpful.
We will discuss how to use the generation, filtering, and visualization components.
Within your robot’s ROS package, add this package to your package.xml, CMakeLists.txt. Then in whatever C++ file add this to your includes:
// Grasp generation and visualization
#include <moveit_simple_grasps/simple_grasps.h>
#include <moveit_simple_grasps/grasp_data.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
Add to your class’s member variables the following:
// Grasp generator
moveit_simple_grasps::SimpleGraspsPtr simple_grasps_;
// class for publishing stuff to rviz
moveit_visual_tools::MoveItVisualToolsPtr visual_tools_;
// robot-specific data for generating grasps
moveit_simple_grasps::GraspData grasp_data_;
In your class’ constructor initialize the visualization tools;
// Load the Robot Viz Tools for publishing to Rviz
visual_tools_.reset(new moveit_visual_tools::MoveItVisualTools("base_link"));
Change the first parameter of visual tools to the name of your robot’s base link. For more information on that package, see moveit_visual_tools.
Then load your robot’s custom .yaml grasp data file:
``` // Load grasp data specific to our robot ros::NodeHandle nh(“~”);
File truncated at 100 lines see the full file