
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
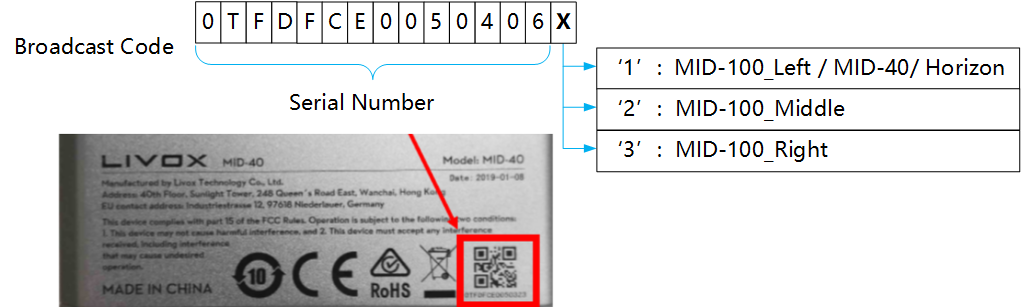
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Livox-SDK/livox_ros_driver.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-02-28 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| livox_ros_driver | 2.0.0 |
README
Livox ROS Driver(览沃ROS驱动程序中文说明)
livox_ros_driver is a new ROS package, specially used to connect LiDAR products produced by Livox. The driver can be run under ubuntu 14.04/16.04/18.04 operating system with ROS environment (indigo, kinetic, melodic) installed. Tested hardware platforms that can run livox_ros_driver include: Intel x86 cpu platforms, and some ARM64 hardware platforms (such as nvida TX2 / Xavier, etc.).
0. Version and Release History
0.1 Current Version
0.2 Release History
1. Install dependencies
Before running livox_ros_driver, ROS and Livox-SDK must be installed.
1.1 ROS installation
For ROS installation, please refer to the ROS installation guide :
Note :
(1) Be sure to install the full version of ROS (ros-distro-desktop-full);
(2) There are 7 to 8 steps in ROS installation, please read the installation guide in detail;
1.2 Livox-SDK Installation
-
Download or clone Livox-SDK from Github to local;
-
Refer to the corresponding README.md document to install and run Livox-SDK;
2. Get and build livox_ros_driver
- Get livox_ros_driver from GitHub :
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Note :
Be sure to use the above command to clone the code to the local, otherwise it will compile error due to the file path problem.
- Use the following command to build livox_ros_driver :
cd ws_livox
catkin_make
- Use the following command to update the current ROS package environment :
source ./devel/setup.sh
3. Run livox_ros_driver
3.1 Use the ROS launch file to load livox_ros_driver
The command format is as follows :
roslaunch livox_ros_driver [launch file] [param]
- If the [param] parameter is empty, livox_ros_driver will connect to the corresponding device according to the configuration in the configuration file. The connection rules are as follows :
When the connection status of the device specified in the configuration file is configured to enable connection (true), the livox_ros_driver will only connect to the device specified in the configuration file;
Note :
(1) the json configuration file is in the “ws_livox/src/livox_ros_driver/config” directory;
(2) When the connection status of the devices specified in the configuration file is all configured to prohibit connection (false), livox_ros_driver will automatically connect all the devices that are scanned;
- If the [param] parameter is the broadcast code of LiDAR, take LiDAR (the broadcast code is 0TFDG3B006H2Z11) and LiDAR (the broadcast code is 1HDDG8M00100191) as an example, Use the command as follows :
roslaunch livox_ros_driver livox_lidar_rviz.launch bd_list:="0TFDG3B006H2Z11&1HDDG8M00100191"
Broadcast code introduction
Each Livox LiDAR device has a unique broadcast code. The broadcast code consists of a 14-character serial number and an additional character (1, 2, or 3), for a total of 15 characters. The above serial number is located under the QR code of the LiDAR body shell (see the figure below). The broadcast code is used to specify the LiDAR device to be connected. The detailed format is as follows :
Note :
X in the figure above corresponds to 1 in MID-100_Left/MID-40/Horizon/Tele products, 2 in MID-100_Middle, and 3 in MID-100_Right.
4. Launch file and livox_ros_driver internal parameter configuration instructions
4.1 Launch file configuration instructions
All launch files of livox_ros_driver are in the “ws_livox/src/livox_ros_driver/launch” directory. Different launch files have different configuration parameter values and are used in different scenarios :
| launch file name | Description |
|---|---|
| livox_lidar_rviz.launch | Connect to Livox LiDAR device Publish pointcloud2 format data Autoload rviz |
File truncated at 100 lines see the full file