
Repository Summary
| Checkout URI | https://github.com/ajtudela/laser_segmentation.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| laser_segmentation | 3.0.2 |
README
laser_segmentation

![]()
![]()
Overview
Implementation of differents algorithms for segmentation of laserscans, splitting them into subsets of beams, with a ROS2 interface. The currently implemented algorithm are:
-
Jump distance clustering:widely used method for 2D laser range data in mobile robotics. It’s a simple and fast method to segment the scans: if the Euclidean distance between two adjacent beams exceeds a given threshold distance, a new segment is generated. -
Jump distance clustering and merge:Similar algorithm as above but checks if pre-predecessor segments are close to each other. This deals with over-segmented data with many small cluster in outdoor environment. It uses the same threshold condition twice.
In the two implementation mentioned above the jump distance threshold is fixed. However, a dynamic jump distance threshold can be calculated using methods of Lee (Lee, 2001), Dietmayer (Dietmayer, et al., 2001) and Santos (Santos, et al., 2003). See the parameters list below to change between them.
Includes a dynamic reconfigure server parameter to change online the configuration of the algorithms and the filtering.
| Laser scan | Segments |
|---|---|
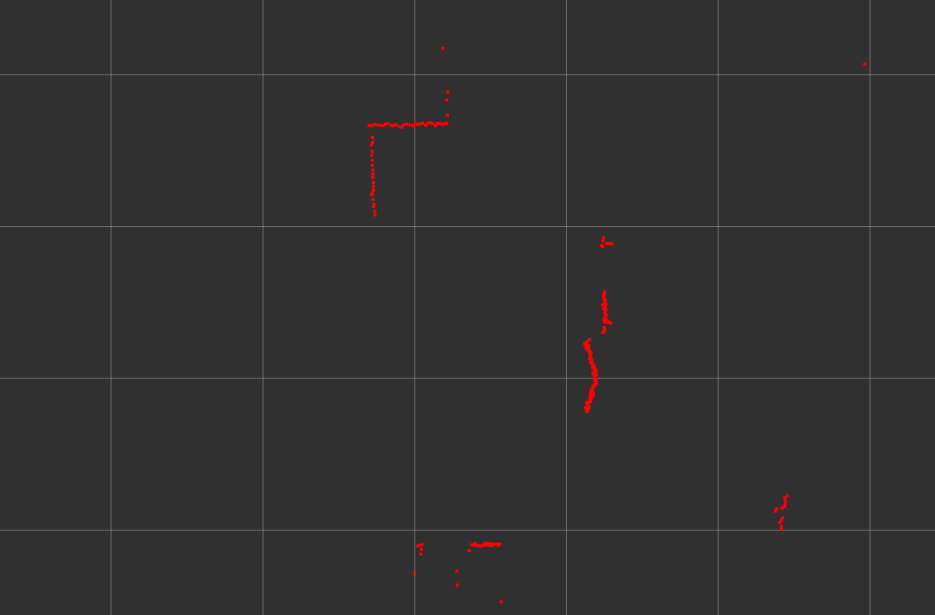 |
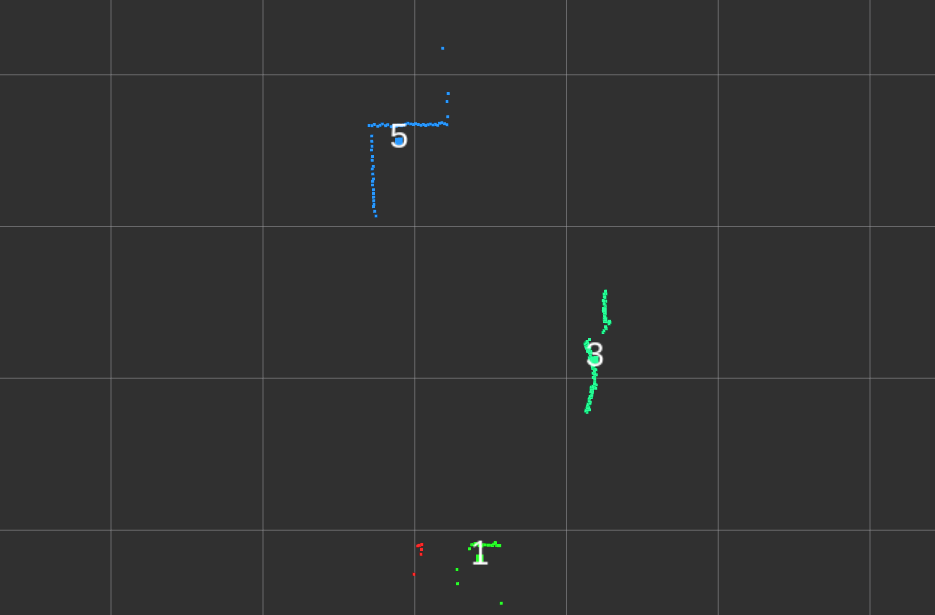 |
Keywords: ROS2, laser, segmentation, clustering
Author: Alberto Tudela
The laser_segmentation package has been tested under [ROS2] Humble on [Ubuntu] 22.04. This is research code, expect that it changes often and any fitness for a particular purpose is disclaimed.
Installation
Building from Source
Dependencies
- Robot Operating System (ROS) 2 (middleware for robotics),
- slg_msgs (Library and messages to interact with laser related geometry - use Humble branch),
Building
To build from source, clone the latest version from the main repository into your colcon workspace and compile the package using
cd colcon_workspace/src
git clone https://github.com/ajtudela/laser_segmentation.git -b humble
cd ../
rosdep install -i --from-path src --rosdistro humble -y
colcon build --symlink-install
Usage
With some scan source running, run the laser_segmentation node with: ros2 launch laser_segmentation segmentation.launch.py
Nodes
laser_segmentation
Segmentation of the laserscans.
Subscribed Topics
-
scan([sensor_msgs/LaserScan])Laser scan topic where segmentation will be performed.
Published Topics
-
segments([slg_msgs/SegmentArray])Splitted segments resulting of the segmentation.
-
segments/visualization([visualization_msgs/MarkerArray])It comprises three namespaces:
-
“segments”: 3d markers of the segments for showing the segments in [Rviz2].
-
“segments_names”: 3d markers with the id of the segments.
-
“centroids”: 3d markers of the segment centroids in [Rviz2].
-
Parameters
-
scan_topic(string, default: “scan”)Topic of the laserscan.
-
segment_topic(string, default: “segments”)Topic of the segmented laser scan.
-
segmentation_type(string, default: “jump_distance”)Choose between several segmentation algorithms. Jump distance clustering (
jump_distance) and jump distance and merge (jump_distance_merge).
Parameters for filtering
-
min_points_segment(int, default: 3)Minimium number of points per segment.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ajtudela/laser_segmentation.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-04-07 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| laser_segmentation | 3.0.4 |
README
laser_segmentation
![]()
![]()
Overview
Implementation of different algorithms for segmentation of laserscans, splitting them into subsets of beams, with a ROS2 interface. The currently implemented algorithm are:
-
Jump distance clustering:widely used method for 2D laser range data in mobile robotics. It’s a simple and fast method to segment the scans: if the Euclidean distance between two adjacent beams exceeds a given threshold distance, a new segment is generated. -
Jump distance clustering and merge:Similar algorithm as above but checks if pre-predecessor segments are close to each other. This deals with over-segmented data with many small cluster in outdoor environment. It uses the same threshold condition twice.
In the two implementation mentioned above the jump distance threshold is fixed. However, a dynamic jump distance threshold can be calculated using methods of Lee (Lee, 2001), Dietmayer (Dietmayer, et al., 2001) and Santos (Santos, et al., 2003). See the parameters list below to change between them.
Includes a dynamic reconfigure server parameter to change online the configuration of the algorithms and the filtering.
| Laser scan | Segments |
|---|---|
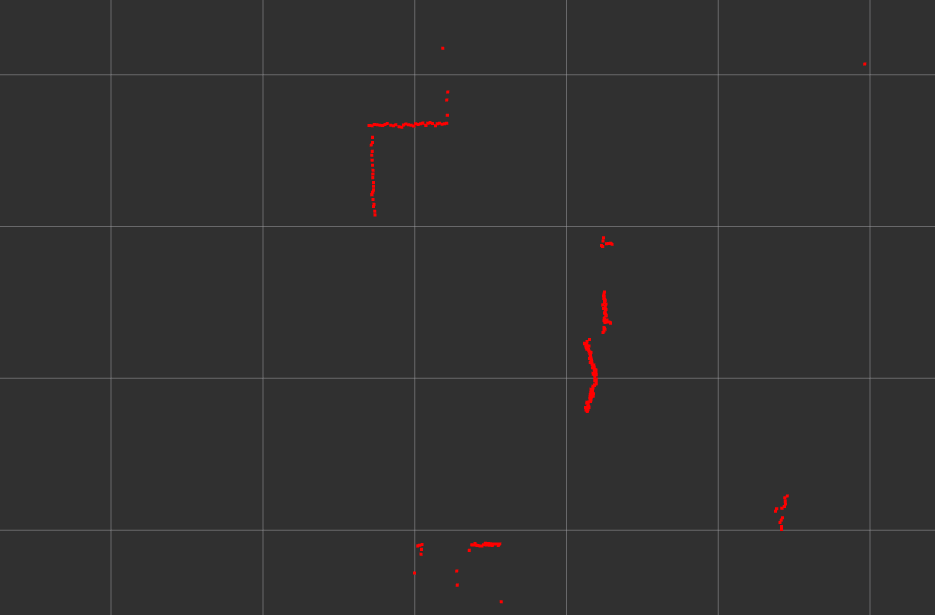 |
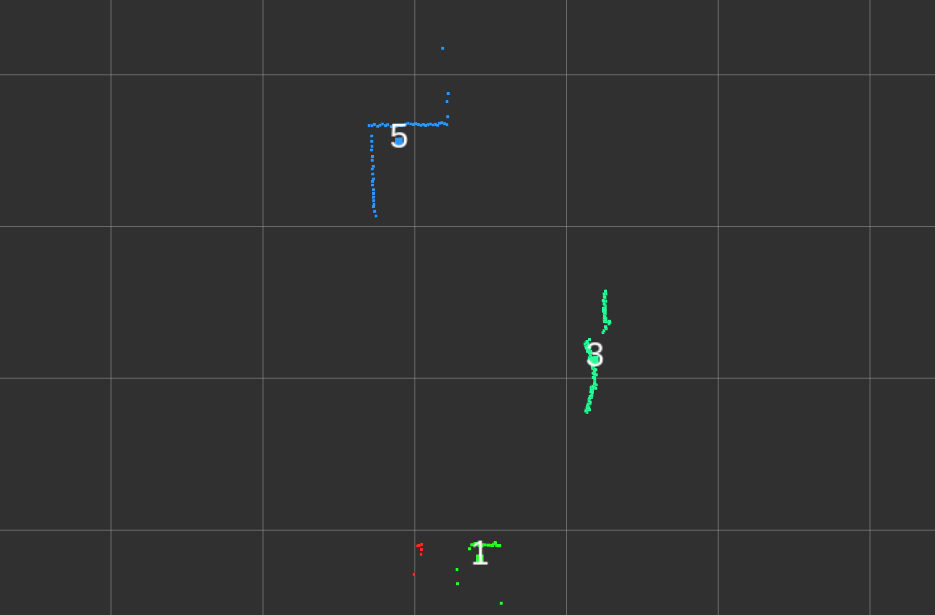 |
Keywords: ROS2, laser, segmentation, clustering
Author: Alberto Tudela
The laser_segmentation package has been tested under [ROS2] Jazzy on [Ubuntu] 24.04. This is research code, expect that it changes often and any fitness for a particular purpose is disclaimed.
Installation
Binaries
On Ubuntu 24.04 you can install the latest version of this package using the following command
sudo apt-get update
sudo apt-get install ros-jazzy-laser-segmentation
Building from Source
Dependencies
- Robot Operating System (ROS) 2 (middleware for robotics),
- slg_msgs (Library and messages to interact with laser related geometry - use Jazzy branch),
Building
To build from source, clone the latest version from the main repository into your colcon workspace and compile the package using
cd colcon_workspace/src
git clone https://github.com/ajtudela/laser_segmentation.git -b jazzy
cd ../
rosdep install -i --from-path src --rosdistro jazzy -y
colcon build --symlink-install
Usage
With some scan source running, run the laser_segmentation node with:
ros2 launch laser_segmentation segmentation.launch.py
Nodes
laser_segmentation
Segmentation of the laserscans.
Subscribed Topics
-
scan([sensor_msgs/LaserScan])Laser scan topic where segmentation will be performed.
Published Topics
-
segments([slg_msgs/SegmentArray])Splitted segments resulting of the segmentation.
-
segments/visualization([visualization_msgs/MarkerArray])It comprises three namespaces:
-
“segments”: 3d markers of the segments for showing the segments in [Rviz2].
-
“segments_names”: 3d markers with the id of the segments.
-
“centroids”: 3d markers of the segment centroids in [Rviz2].
-
Parameters
-
scan_topic(string, default: “scan”)Topic of the laserscan.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ajtudela/laser_segmentation.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-04-07 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| laser_segmentation | 3.0.4 |
README
laser_segmentation
![]()
![]()
Overview
Implementation of different algorithms for segmentation of laserscans, splitting them into subsets of beams, with a ROS2 interface. The currently implemented algorithm are:
-
Jump distance clustering:widely used method for 2D laser range data in mobile robotics. It’s a simple and fast method to segment the scans: if the Euclidean distance between two adjacent beams exceeds a given threshold distance, a new segment is generated. -
Jump distance clustering and merge:Similar algorithm as above but checks if pre-predecessor segments are close to each other. This deals with over-segmented data with many small cluster in outdoor environment. It uses the same threshold condition twice.
In the two implementation mentioned above the jump distance threshold is fixed. However, a dynamic jump distance threshold can be calculated using methods of Lee (Lee, 2001), Dietmayer (Dietmayer, et al., 2001) and Santos (Santos, et al., 2003). See the parameters list below to change between them.
Includes a dynamic reconfigure server parameter to change online the configuration of the algorithms and the filtering.
| Laser scan | Segments |
|---|---|
|
|
Keywords: ROS2, laser, segmentation, clustering
Author: Alberto Tudela
The laser_segmentation package has been tested under [ROS2] Jazzy on [Ubuntu] 24.04. This is research code, expect that it changes often and any fitness for a particular purpose is disclaimed.
Installation
Binaries
On Ubuntu 24.04 you can install the latest version of this package using the following command
sudo apt-get update
sudo apt-get install ros-jazzy-laser-segmentation
Building from Source
Dependencies
- Robot Operating System (ROS) 2 (middleware for robotics),
- slg_msgs (Library and messages to interact with laser related geometry - use Jazzy branch),
Building
To build from source, clone the latest version from the main repository into your colcon workspace and compile the package using
cd colcon_workspace/src
git clone https://github.com/ajtudela/laser_segmentation.git -b jazzy
cd ../
rosdep install -i --from-path src --rosdistro jazzy -y
colcon build --symlink-install
Usage
With some scan source running, run the laser_segmentation node with:
ros2 launch laser_segmentation segmentation.launch.py
Nodes
laser_segmentation
Segmentation of the laserscans.
Subscribed Topics
-
scan([sensor_msgs/LaserScan])Laser scan topic where segmentation will be performed.
Published Topics
-
segments([slg_msgs/SegmentArray])Splitted segments resulting of the segmentation.
-
segments/visualization([visualization_msgs/MarkerArray])It comprises three namespaces:
-
“segments”: 3d markers of the segments for showing the segments in [Rviz2].
-
“segments_names”: 3d markers with the id of the segments.
-
“centroids”: 3d markers of the segment centroids in [Rviz2].
-
Parameters
-
scan_topic(string, default: “scan”)Topic of the laserscan.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/ajtudela/laser_segmentation.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-04-07 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| laser_segmentation | 3.0.4 |
README
laser_segmentation
![]()
![]()
Overview
Implementation of different algorithms for segmentation of laserscans, splitting them into subsets of beams, with a ROS2 interface. The currently implemented algorithm are:
-
Jump distance clustering:widely used method for 2D laser range data in mobile robotics. It’s a simple and fast method to segment the scans: if the Euclidean distance between two adjacent beams exceeds a given threshold distance, a new segment is generated. -
Jump distance clustering and merge:Similar algorithm as above but checks if pre-predecessor segments are close to each other. This deals with over-segmented data with many small cluster in outdoor environment. It uses the same threshold condition twice.
In the two implementation mentioned above the jump distance threshold is fixed. However, a dynamic jump distance threshold can be calculated using methods of Lee (Lee, 2001), Dietmayer (Dietmayer, et al., 2001) and Santos (Santos, et al., 2003). See the parameters list below to change between them.
Includes a dynamic reconfigure server parameter to change online the configuration of the algorithms and the filtering.
| Laser scan | Segments |
|---|---|
|
|
Keywords: ROS2, laser, segmentation, clustering
Author: Alberto Tudela
The laser_segmentation package has been tested under [ROS2] Jazzy on [Ubuntu] 24.04. This is research code, expect that it changes often and any fitness for a particular purpose is disclaimed.
Installation
Binaries
On Ubuntu 24.04 you can install the latest version of this package using the following command
sudo apt-get update
sudo apt-get install ros-jazzy-laser-segmentation
Building from Source
Dependencies
- Robot Operating System (ROS) 2 (middleware for robotics),
- slg_msgs (Library and messages to interact with laser related geometry - use Jazzy branch),
Building
To build from source, clone the latest version from the main repository into your colcon workspace and compile the package using
cd colcon_workspace/src
git clone https://github.com/ajtudela/laser_segmentation.git -b jazzy
cd ../
rosdep install -i --from-path src --rosdistro jazzy -y
colcon build --symlink-install
Usage
With some scan source running, run the laser_segmentation node with:
ros2 launch laser_segmentation segmentation.launch.py
Nodes
laser_segmentation
Segmentation of the laserscans.
Subscribed Topics
-
scan([sensor_msgs/LaserScan])Laser scan topic where segmentation will be performed.
Published Topics
-
segments([slg_msgs/SegmentArray])Splitted segments resulting of the segmentation.
-
segments/visualization([visualization_msgs/MarkerArray])It comprises three namespaces:
-
“segments”: 3d markers of the segments for showing the segments in [Rviz2].
-
“segments_names”: 3d markers with the id of the segments.
-
“centroids”: 3d markers of the segment centroids in [Rviz2].
-
Parameters
-
scan_topic(string, default: “scan”)Topic of the laserscan.
File truncated at 100 lines see the full file