
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository 


This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’




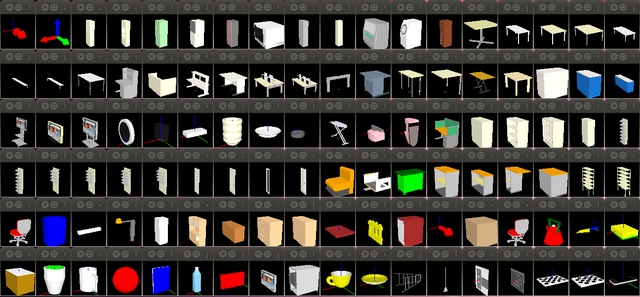
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
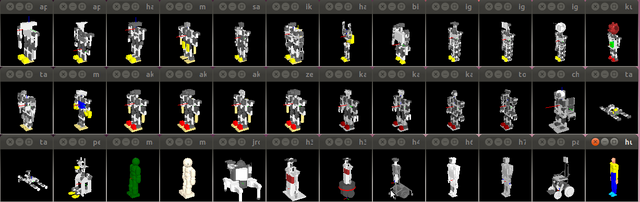
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jskeus-release.git |
| VCS Type | git |
| VCS Version | release/jade/jskeus |
| Last Updated | 2017-03-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jskeus | 1.1.0 |
README
JSK EusLisp repository 
This repository containts software devleoped and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install binary (RECOMMENDED: Ubuntu 14.04)
1.1.1 Setup ROS repository
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
sudo apt-get update
1.1.2 Install Euslisp
sudo apt-get install ros-indigo-euslisp
1.2 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’




2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procdeure if you already setup ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-indigo-pr2eus
3.3 Running demo programs
3.3.1 Visualizinot pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try following command
$ roscd pr2eus
;; read joint state and display in euslisp viewer, print jacobian
$ roslaunch ./pr2-read-state.launch
;; sample program to show how to make pr2 posture from euslisp, THIS WILL MOVE REAL ROBOT, CAUTION!!!
$ roslaunch ./pr2-send-joints.launch
You can use our script to set ROS_MASTER_URI and ROS_IP
```
$ source rospack find jsk_tools/src/bashrc.ros
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jskeus-release.git |
| VCS Type | git |
| VCS Version | release/jade/jskeus |
| Last Updated | 2017-03-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jskeus | 1.1.0 |
README
JSK EusLisp repository
This repository containts software devleoped and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install binary (RECOMMENDED: Ubuntu 14.04)
1.1.1 Setup ROS repository
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
sudo apt-get update
1.1.2 Install Euslisp
sudo apt-get install ros-indigo-euslisp
1.2 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procdeure if you already setup ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-indigo-pr2eus
3.3 Running demo programs
3.3.1 Visualizinot pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try following command
$ roscd pr2eus
;; read joint state and display in euslisp viewer, print jacobian
$ roslaunch ./pr2-read-state.launch
;; sample program to show how to make pr2 posture from euslisp, THIS WILL MOVE REAL ROBOT, CAUTION!!!
$ roslaunch ./pr2-send-joints.launch
You can use our script to set ROS_MASTER_URI and ROS_IP
```
$ source rospack find jsk_tools/src/bashrc.ros
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jskeus-release.git |
| VCS Type | git |
| VCS Version | release/jade/jskeus |
| Last Updated | 2017-03-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jskeus | 1.1.0 |
README
JSK EusLisp repository
This repository containts software devleoped and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install binary (RECOMMENDED: Ubuntu 14.04)
1.1.1 Setup ROS repository
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
sudo apt-get update
1.1.2 Install Euslisp
sudo apt-get install ros-indigo-euslisp
1.2 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procdeure if you already setup ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-indigo-pr2eus
3.3 Running demo programs
3.3.1 Visualizinot pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try following command
$ roscd pr2eus
;; read joint state and display in euslisp viewer, print jacobian
$ roslaunch ./pr2-read-state.launch
;; sample program to show how to make pr2 posture from euslisp, THIS WILL MOVE REAL ROBOT, CAUTION!!!
$ roslaunch ./pr2-send-joints.launch
You can use our script to set ROS_MASTER_URI and ROS_IP
```
$ source rospack find jsk_tools/src/bashrc.ros
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/euslisp/jskeus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
README
JSK EusLisp repository
This repository contains software developed and used by JSK at The University of Tokyo.
1. Getting started
1.1 Install from binary
Since Debian 11(Bullseye) / Ubuntu 22.04(jammy), euslisp/jskeus is distributed under official repository. See https://packages.debian.org/source/euslisp and https://launchpad.net/ubuntu/+source/euslisp
sudo apt update
sudo apt install euslisp euslisp-dev jskeus jskeus-dev
1.2 Install for ROS1(~ Ubuntu 20.04) users
1.2.1 Setup ROS repository
Please set ROS_DISTRO environment variable to your ROS distro. For example, if you use 18.04, run export ROS_DISTRO=melodic.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
1.2.2 Install Euslisp
sudo apt-get install ros-$ROS_DISTRO-euslisp
1.3 Install via Homebrew (OSX)
brew install euslisp/jskeus/jskeus
2 Playing with Demo programs
2.1 Motion generation
$ irteusgl irteus/demo/demo.l
and type any command, such as ‘(crank-motion)’ or ‘(dual-arm-ik)’
2.2 Robots and objects models
$ irteusgl models/irt-all-robots.l "(make-all-robots)"
$ irteusgl models/irt-all-objects.l "(make-all-objects)"
3 Getting started for ROS and PR2 users
3.1 Install binaries (RECOMMENDED: Ubuntu 14.04)
3.1.1 Setup ROS repository
You can skip this procedure if you have already setup your ROS system
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
echo "source /opt/ros/$ROS_DISTRO/setup.bash" >> ~/.bashrc
sudo apt-get update
3.1.2 Install pr2/euslisp programs
sudo apt-get install ros-$ROS_DISTRO-pr2eus
3.3 Running demo programs
3.3.1 Visualization of pr2 robot
$ rosrun euscollada pr2.sh
3.3.2 For real PR2 users
After you set ROS_MASTER_URI and ROS_IP to your PR2 robot (or simulated PR2), try the following command:
File truncated at 100 lines see the full file