
Repository Summary
| Checkout URI | https://github.com/ethz-adrl/ifopt.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-03-21 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ifopt | 2.1.4 |
README

![]()
![]()
![]()
![]()
A modern, light-weight, [Eigen]-based C++ interface to Nonlinear Programming solvers, such as [Ipopt] and [Snopt].
An example nonlinear optimization problem to solve is defined as:

- To see how this problem is formulated, see test_vars_constr_cost.h.
- Afterwards the problem can be solved using e.g. Ipopt as shown in ex_test_ipopt.cc.
</br>
Features • Install • Examples • Contribute • Publications • Authors
Features
Combines the advantages of [Ipopt] / [Snopt] and [Eigen]:
| [Ipopt] / [Snopt] | [Eigen] |
|---|---|
| :heavy_check_mark: high-quality solvers for nonlinear optimization | :heavy_check_mark: modern, intuitive formulations of vectors and matrices |
| :x: C++ API inconvenient and error-prone (raw pointers, index management, jacobian construction) | :heavy_check_mark: highly efficient implementations |
| :x: linking and exporting difficult |
- Solver independent formulation of variables and constraints with Eigen (highly efficient)
- Automatic index management by formulation of variable- and constraint-sets
- Integration: pure cmake
find_package(ifopt)or [catkin]/[ROS] (optional) - light-weight (~2k lines of code) makes it easy to use and extend
{kind=link}
</br>
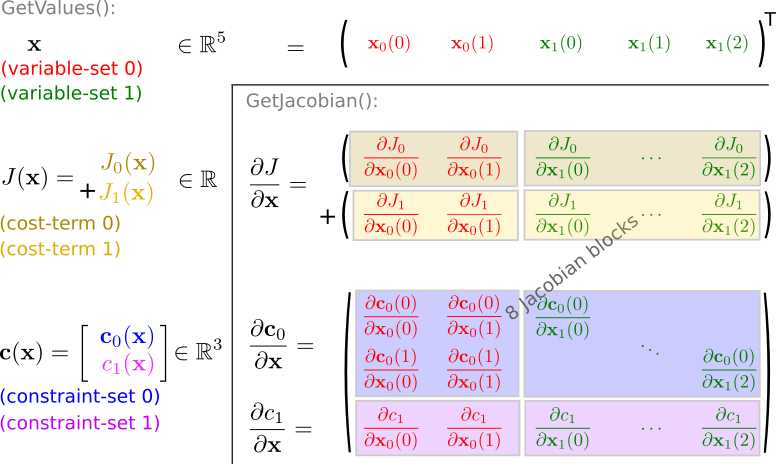
An optimization problem consists of multiple independent variable- and constraint-sets. Each set represents a common concept, e.g. a set of variables might represents spline coefficients, another footstep positions. Similarly, a constraint-set groups similar constraints together. ifopt allows users to define each of these sets independently in separate classes and then builds the overall problem from these sets. (No more worrying adapting indices when adding or removing sets).
</br>
find x0, x1 (variable-sets 0 & 1)
s.t
x0_lower <= x0 <= x0_upper (bounds on variable-set x0 \in R^2)
{x0,x1} = arg min c0(x0,x1)+c1(x0,x1) (cost-terms 0 and 1)
g0_lower < g0(x0,x1) < g0_upper (constraint-set 0 \in R^2)
g1_lower < g1(x0,x1) < g0_upper (constraint-set 1 \in R^1)
</br>
Supplying derivative information greatly increases solution speed. ifopt allows to define the derivative of each cost-term/constraint-set with respect to each variable-set independently. This ensures that when the order of variable-sets changes in the overall vector, this derivative information is still valid. These “Jacobian blocks” must be supplied through ConstraintSet::FillJacobianBlock() and are then used to build the complete Jacobian for the cost and constraints.
</br>
A graphical overview as UML can be seen here.
Install
The easiest way to install is through the ROS binaries and you’re all set!
sudo apt-get install ros-<distro>-ifopt
Install dependencies
In case you don’t use ROS or the binaries don’t exist for your distro, you can easily build these packages from source. For this, install the required dependencies [Cmake], [Eigen] and [Ipopt] using
sudo apt-get install cmake libeigen3-dev coinor-libipopt-dev
If you want to link to a local installation of [Ipopt] or to [Snopt], see here.
Build with cmake
- Install
git clone https://github.com/ethz-adrl/ifopt.git && cd ifopt
mkdir build && cd build
cmake ..
make
sudo make install # copies files in this folder to /usr/local/*
# sudo xargs rm < install_manifest.txt # in case you want to uninstall the above
File truncated at 100 lines see the full file
CONTRIBUTING
Contributing to ifopt
:+1::tada: First off, thanks for taking the time to contribute! :tada::+1:
We are grateful to anyone who decides to actively engage in this project. This project and everyone participating in it is governed by the Code of Conduct. By participating, you are expected to uphold this code.
Question or Issue?
-
ROS Answers: If you want to ask a general usage question, please do this at ROS Answers using the tag
ifopt. Asking there has the following advantages:- There are many more people reading questions there so your chances on getting an answer and in a timely manner are much higher.
- In the future other users will search there for similar problems and can find your question and the potential answers.
-
Issue tracker: In case you want to report bugs, request features or closely related to the code, the Issue tracker in this repo is the way to go.
How Can I Contribute?
Unsure where to begin contributing to ifopt? You can start by looking through these beginner and help-wanted issues:
- Good first issues - issues which should only require a few lines of code, and a test or two.
-
Help wanted issues - issues which should be a bit more involved than
beginnerissues.
Further ideas might include:
- writing interfaces to additional solvers
- reporting bugs
- enhance documentation
- add unit tests
Please follow the Google Style Guide when writing your C++ Code for this project.
Submitting a pull request
Please create a pull request from your forked repo to the master branch.
- Keep pull requests small, focussing on one specific issue.
- Describe concisely what you are solving and reference the corresponding issue.
- Include weblinks to relevant information.
- Include screenshots and animated GIFs in your pull request whenever possible.
We are performing automatic pull request testing, so if you see anything red, please read through the log and update your pull request until the tests pass.
Repository Summary
| Checkout URI | https://github.com/ethz-adrl/ifopt.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-03-21 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ifopt | 2.1.4 |
README
![]()
![]()
![]()
![]()
A modern, light-weight, [Eigen]-based C++ interface to Nonlinear Programming solvers, such as [Ipopt] and [Snopt].
An example nonlinear optimization problem to solve is defined as:
- To see how this problem is formulated, see test_vars_constr_cost.h.
- Afterwards the problem can be solved using e.g. Ipopt as shown in ex_test_ipopt.cc.
</br>
Features • Install • Examples • Contribute • Publications • Authors
Features
Combines the advantages of [Ipopt] / [Snopt] and [Eigen]:
| [Ipopt] / [Snopt] | [Eigen] |
|---|---|
| :heavy_check_mark: high-quality solvers for nonlinear optimization | :heavy_check_mark: modern, intuitive formulations of vectors and matrices |
| :x: C++ API inconvenient and error-prone (raw pointers, index management, jacobian construction) | :heavy_check_mark: highly efficient implementations |
| :x: linking and exporting difficult |
- Solver independent formulation of variables and constraints with Eigen (highly efficient)
- Automatic index management by formulation of variable- and constraint-sets
- Integration: pure cmake
find_package(ifopt)or [catkin]/[ROS] (optional) - light-weight (~2k lines of code) makes it easy to use and extend
</br>
An optimization problem consists of multiple independent variable- and constraint-sets. Each set represents a common concept, e.g. a set of variables might represents spline coefficients, another footstep positions. Similarly, a constraint-set groups similar constraints together. ifopt allows users to define each of these sets independently in separate classes and then builds the overall problem from these sets. (No more worrying adapting indices when adding or removing sets).
</br>
find x0, x1 (variable-sets 0 & 1)
s.t
x0_lower <= x0 <= x0_upper (bounds on variable-set x0 \in R^2)
{x0,x1} = arg min c0(x0,x1)+c1(x0,x1) (cost-terms 0 and 1)
g0_lower < g0(x0,x1) < g0_upper (constraint-set 0 \in R^2)
g1_lower < g1(x0,x1) < g0_upper (constraint-set 1 \in R^1)
</br>
Supplying derivative information greatly increases solution speed. ifopt allows to define the derivative of each cost-term/constraint-set with respect to each variable-set independently. This ensures that when the order of variable-sets changes in the overall vector, this derivative information is still valid. These “Jacobian blocks” must be supplied through ConstraintSet::FillJacobianBlock() and are then used to build the complete Jacobian for the cost and constraints.
</br>
A graphical overview as UML can be seen here.
Install
The easiest way to install is through the ROS binaries and you’re all set!
sudo apt-get install ros-<distro>-ifopt
Install dependencies
In case you don’t use ROS or the binaries don’t exist for your distro, you can easily build these packages from source. For this, install the required dependencies [Cmake], [Eigen] and [Ipopt] using
sudo apt-get install cmake libeigen3-dev coinor-libipopt-dev
If you want to link to a local installation of [Ipopt] or to [Snopt], see here.
Build with cmake
- Install
git clone https://github.com/ethz-adrl/ifopt.git && cd ifopt
mkdir build && cd build
cmake ..
make
sudo make install # copies files in this folder to /usr/local/*
# sudo xargs rm < install_manifest.txt # in case you want to uninstall the above
File truncated at 100 lines see the full file
CONTRIBUTING
Contributing to ifopt
:+1::tada: First off, thanks for taking the time to contribute! :tada::+1:
We are grateful to anyone who decides to actively engage in this project. This project and everyone participating in it is governed by the Code of Conduct. By participating, you are expected to uphold this code.
Question or Issue?
-
ROS Answers: If you want to ask a general usage question, please do this at ROS Answers using the tag
ifopt. Asking there has the following advantages:- There are many more people reading questions there so your chances on getting an answer and in a timely manner are much higher.
- In the future other users will search there for similar problems and can find your question and the potential answers.
-
Issue tracker: In case you want to report bugs, request features or closely related to the code, the Issue tracker in this repo is the way to go.
How Can I Contribute?
Unsure where to begin contributing to ifopt? You can start by looking through these beginner and help-wanted issues:
- Good first issues - issues which should only require a few lines of code, and a test or two.
-
Help wanted issues - issues which should be a bit more involved than
beginnerissues.
Further ideas might include:
- writing interfaces to additional solvers
- reporting bugs
- enhance documentation
- add unit tests
Please follow the Google Style Guide when writing your C++ Code for this project.
Submitting a pull request
Please create a pull request from your forked repo to the master branch.
- Keep pull requests small, focussing on one specific issue.
- Describe concisely what you are solving and reference the corresponding issue.
- Include weblinks to relevant information.
- Include screenshots and animated GIFs in your pull request whenever possible.
We are performing automatic pull request testing, so if you see anything red, please read through the log and update your pull request until the tests pass.
Repository Summary
| Checkout URI | https://github.com/ethz-adrl/ifopt.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-03-21 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ifopt | 2.1.4 |
README
![]()
![]()
![]()
![]()
A modern, light-weight, [Eigen]-based C++ interface to Nonlinear Programming solvers, such as [Ipopt] and [Snopt].
An example nonlinear optimization problem to solve is defined as:
- To see how this problem is formulated, see test_vars_constr_cost.h.
- Afterwards the problem can be solved using e.g. Ipopt as shown in ex_test_ipopt.cc.
</br>
Features • Install • Examples • Contribute • Publications • Authors
Features
Combines the advantages of [Ipopt] / [Snopt] and [Eigen]:
| [Ipopt] / [Snopt] | [Eigen] |
|---|---|
| :heavy_check_mark: high-quality solvers for nonlinear optimization | :heavy_check_mark: modern, intuitive formulations of vectors and matrices |
| :x: C++ API inconvenient and error-prone (raw pointers, index management, jacobian construction) | :heavy_check_mark: highly efficient implementations |
| :x: linking and exporting difficult |
- Solver independent formulation of variables and constraints with Eigen (highly efficient)
- Automatic index management by formulation of variable- and constraint-sets
- Integration: pure cmake
find_package(ifopt)or [catkin]/[ROS] (optional) - light-weight (~2k lines of code) makes it easy to use and extend
</br>
An optimization problem consists of multiple independent variable- and constraint-sets. Each set represents a common concept, e.g. a set of variables might represents spline coefficients, another footstep positions. Similarly, a constraint-set groups similar constraints together. ifopt allows users to define each of these sets independently in separate classes and then builds the overall problem from these sets. (No more worrying adapting indices when adding or removing sets).
</br>
find x0, x1 (variable-sets 0 & 1)
s.t
x0_lower <= x0 <= x0_upper (bounds on variable-set x0 \in R^2)
{x0,x1} = arg min c0(x0,x1)+c1(x0,x1) (cost-terms 0 and 1)
g0_lower < g0(x0,x1) < g0_upper (constraint-set 0 \in R^2)
g1_lower < g1(x0,x1) < g0_upper (constraint-set 1 \in R^1)
</br>
Supplying derivative information greatly increases solution speed. ifopt allows to define the derivative of each cost-term/constraint-set with respect to each variable-set independently. This ensures that when the order of variable-sets changes in the overall vector, this derivative information is still valid. These “Jacobian blocks” must be supplied through ConstraintSet::FillJacobianBlock() and are then used to build the complete Jacobian for the cost and constraints.
</br>
A graphical overview as UML can be seen here.
Install
The easiest way to install is through the ROS binaries and you’re all set!
sudo apt-get install ros-<distro>-ifopt
Install dependencies
In case you don’t use ROS or the binaries don’t exist for your distro, you can easily build these packages from source. For this, install the required dependencies [Cmake], [Eigen] and [Ipopt] using
sudo apt-get install cmake libeigen3-dev coinor-libipopt-dev
If you want to link to a local installation of [Ipopt] or to [Snopt], see here.
Build with cmake
- Install
git clone https://github.com/ethz-adrl/ifopt.git && cd ifopt
mkdir build && cd build
cmake ..
make
sudo make install # copies files in this folder to /usr/local/*
# sudo xargs rm < install_manifest.txt # in case you want to uninstall the above
File truncated at 100 lines see the full file
CONTRIBUTING
Contributing to ifopt
:+1::tada: First off, thanks for taking the time to contribute! :tada::+1:
We are grateful to anyone who decides to actively engage in this project. This project and everyone participating in it is governed by the Code of Conduct. By participating, you are expected to uphold this code.
Question or Issue?
-
ROS Answers: If you want to ask a general usage question, please do this at ROS Answers using the tag
ifopt. Asking there has the following advantages:- There are many more people reading questions there so your chances on getting an answer and in a timely manner are much higher.
- In the future other users will search there for similar problems and can find your question and the potential answers.
-
Issue tracker: In case you want to report bugs, request features or closely related to the code, the Issue tracker in this repo is the way to go.
How Can I Contribute?
Unsure where to begin contributing to ifopt? You can start by looking through these beginner and help-wanted issues:
- Good first issues - issues which should only require a few lines of code, and a test or two.
-
Help wanted issues - issues which should be a bit more involved than
beginnerissues.
Further ideas might include:
- writing interfaces to additional solvers
- reporting bugs
- enhance documentation
- add unit tests
Please follow the Google Style Guide when writing your C++ Code for this project.
Submitting a pull request
Please create a pull request from your forked repo to the master branch.
- Keep pull requests small, focussing on one specific issue.
- Describe concisely what you are solving and reference the corresponding issue.
- Include weblinks to relevant information.
- Include screenshots and animated GIFs in your pull request whenever possible.
We are performing automatic pull request testing, so if you see anything red, please read through the log and update your pull request until the tests pass.
Repository Summary
| Checkout URI | https://github.com/ethz-adrl/ifopt.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-03-21 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ifopt | 2.1.4 |
README
![]()
![]()
![]()
![]()
A modern, light-weight, [Eigen]-based C++ interface to Nonlinear Programming solvers, such as [Ipopt] and [Snopt].
An example nonlinear optimization problem to solve is defined as:
- To see how this problem is formulated, see test_vars_constr_cost.h.
- Afterwards the problem can be solved using e.g. Ipopt as shown in ex_test_ipopt.cc.
</br>
Features • Install • Examples • Contribute • Publications • Authors
Features
Combines the advantages of [Ipopt] / [Snopt] and [Eigen]:
| [Ipopt] / [Snopt] | [Eigen] |
|---|---|
| :heavy_check_mark: high-quality solvers for nonlinear optimization | :heavy_check_mark: modern, intuitive formulations of vectors and matrices |
| :x: C++ API inconvenient and error-prone (raw pointers, index management, jacobian construction) | :heavy_check_mark: highly efficient implementations |
| :x: linking and exporting difficult |
- Solver independent formulation of variables and constraints with Eigen (highly efficient)
- Automatic index management by formulation of variable- and constraint-sets
- Integration: pure cmake
find_package(ifopt)or [catkin]/[ROS] (optional) - light-weight (~2k lines of code) makes it easy to use and extend
</br>
An optimization problem consists of multiple independent variable- and constraint-sets. Each set represents a common concept, e.g. a set of variables might represents spline coefficients, another footstep positions. Similarly, a constraint-set groups similar constraints together. ifopt allows users to define each of these sets independently in separate classes and then builds the overall problem from these sets. (No more worrying adapting indices when adding or removing sets).
</br>
find x0, x1 (variable-sets 0 & 1)
s.t
x0_lower <= x0 <= x0_upper (bounds on variable-set x0 \in R^2)
{x0,x1} = arg min c0(x0,x1)+c1(x0,x1) (cost-terms 0 and 1)
g0_lower < g0(x0,x1) < g0_upper (constraint-set 0 \in R^2)
g1_lower < g1(x0,x1) < g0_upper (constraint-set 1 \in R^1)
</br>
Supplying derivative information greatly increases solution speed. ifopt allows to define the derivative of each cost-term/constraint-set with respect to each variable-set independently. This ensures that when the order of variable-sets changes in the overall vector, this derivative information is still valid. These “Jacobian blocks” must be supplied through ConstraintSet::FillJacobianBlock() and are then used to build the complete Jacobian for the cost and constraints.
</br>
A graphical overview as UML can be seen here.
Install
The easiest way to install is through the ROS binaries and you’re all set!
sudo apt-get install ros-<distro>-ifopt
Install dependencies
In case you don’t use ROS or the binaries don’t exist for your distro, you can easily build these packages from source. For this, install the required dependencies [Cmake], [Eigen] and [Ipopt] using
sudo apt-get install cmake libeigen3-dev coinor-libipopt-dev
If you want to link to a local installation of [Ipopt] or to [Snopt], see here.
Build with cmake
- Install
git clone https://github.com/ethz-adrl/ifopt.git && cd ifopt
mkdir build && cd build
cmake ..
make
sudo make install # copies files in this folder to /usr/local/*
# sudo xargs rm < install_manifest.txt # in case you want to uninstall the above
File truncated at 100 lines see the full file
CONTRIBUTING
Contributing to ifopt
:+1::tada: First off, thanks for taking the time to contribute! :tada::+1:
We are grateful to anyone who decides to actively engage in this project. This project and everyone participating in it is governed by the Code of Conduct. By participating, you are expected to uphold this code.
Question or Issue?
-
ROS Answers: If you want to ask a general usage question, please do this at ROS Answers using the tag
ifopt. Asking there has the following advantages:- There are many more people reading questions there so your chances on getting an answer and in a timely manner are much higher.
- In the future other users will search there for similar problems and can find your question and the potential answers.
-
Issue tracker: In case you want to report bugs, request features or closely related to the code, the Issue tracker in this repo is the way to go.
How Can I Contribute?
Unsure where to begin contributing to ifopt? You can start by looking through these beginner and help-wanted issues:
- Good first issues - issues which should only require a few lines of code, and a test or two.
-
Help wanted issues - issues which should be a bit more involved than
beginnerissues.
Further ideas might include:
- writing interfaces to additional solvers
- reporting bugs
- enhance documentation
- add unit tests
Please follow the Google Style Guide when writing your C++ Code for this project.
Submitting a pull request
Please create a pull request from your forked repo to the master branch.
- Keep pull requests small, focussing on one specific issue.
- Describe concisely what you are solving and reference the corresponding issue.
- Include weblinks to relevant information.
- Include screenshots and animated GIFs in your pull request whenever possible.
We are performing automatic pull request testing, so if you see anything red, please read through the log and update your pull request until the tests pass.
Repository Summary
| Checkout URI | https://github.com/ethz-adrl/ifopt.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-03-21 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ifopt | 2.1.4 |
README
![]()
![]()
![]()
![]()
A modern, light-weight, [Eigen]-based C++ interface to Nonlinear Programming solvers, such as [Ipopt] and [Snopt].
An example nonlinear optimization problem to solve is defined as:
- To see how this problem is formulated, see test_vars_constr_cost.h.
- Afterwards the problem can be solved using e.g. Ipopt as shown in ex_test_ipopt.cc.
</br>
Features • Install • Examples • Contribute • Publications • Authors
Features
Combines the advantages of [Ipopt] / [Snopt] and [Eigen]:
| [Ipopt] / [Snopt] | [Eigen] |
|---|---|
| :heavy_check_mark: high-quality solvers for nonlinear optimization | :heavy_check_mark: modern, intuitive formulations of vectors and matrices |
| :x: C++ API inconvenient and error-prone (raw pointers, index management, jacobian construction) | :heavy_check_mark: highly efficient implementations |
| :x: linking and exporting difficult |
- Solver independent formulation of variables and constraints with Eigen (highly efficient)
- Automatic index management by formulation of variable- and constraint-sets
- Integration: pure cmake
find_package(ifopt)or [catkin]/[ROS] (optional) - light-weight (~2k lines of code) makes it easy to use and extend
</br>
An optimization problem consists of multiple independent variable- and constraint-sets. Each set represents a common concept, e.g. a set of variables might represents spline coefficients, another footstep positions. Similarly, a constraint-set groups similar constraints together. ifopt allows users to define each of these sets independently in separate classes and then builds the overall problem from these sets. (No more worrying adapting indices when adding or removing sets).
</br>
find x0, x1 (variable-sets 0 & 1)
s.t
x0_lower <= x0 <= x0_upper (bounds on variable-set x0 \in R^2)
{x0,x1} = arg min c0(x0,x1)+c1(x0,x1) (cost-terms 0 and 1)
g0_lower < g0(x0,x1) < g0_upper (constraint-set 0 \in R^2)
g1_lower < g1(x0,x1) < g0_upper (constraint-set 1 \in R^1)
</br>
Supplying derivative information greatly increases solution speed. ifopt allows to define the derivative of each cost-term/constraint-set with respect to each variable-set independently. This ensures that when the order of variable-sets changes in the overall vector, this derivative information is still valid. These “Jacobian blocks” must be supplied through ConstraintSet::FillJacobianBlock() and are then used to build the complete Jacobian for the cost and constraints.
</br>
A graphical overview as UML can be seen here.
Install
The easiest way to install is through the ROS binaries and you’re all set!
sudo apt-get install ros-<distro>-ifopt
Install dependencies
In case you don’t use ROS or the binaries don’t exist for your distro, you can easily build these packages from source. For this, install the required dependencies [Cmake], [Eigen] and [Ipopt] using
sudo apt-get install cmake libeigen3-dev coinor-libipopt-dev
If you want to link to a local installation of [Ipopt] or to [Snopt], see here.
Build with cmake
- Install
git clone https://github.com/ethz-adrl/ifopt.git && cd ifopt
mkdir build && cd build
cmake ..
make
sudo make install # copies files in this folder to /usr/local/*
# sudo xargs rm < install_manifest.txt # in case you want to uninstall the above
File truncated at 100 lines see the full file
CONTRIBUTING
Contributing to ifopt
:+1::tada: First off, thanks for taking the time to contribute! :tada::+1:
We are grateful to anyone who decides to actively engage in this project. This project and everyone participating in it is governed by the Code of Conduct. By participating, you are expected to uphold this code.
Question or Issue?
-
ROS Answers: If you want to ask a general usage question, please do this at ROS Answers using the tag
ifopt. Asking there has the following advantages:- There are many more people reading questions there so your chances on getting an answer and in a timely manner are much higher.
- In the future other users will search there for similar problems and can find your question and the potential answers.
-
Issue tracker: In case you want to report bugs, request features or closely related to the code, the Issue tracker in this repo is the way to go.
How Can I Contribute?
Unsure where to begin contributing to ifopt? You can start by looking through these beginner and help-wanted issues:
- Good first issues - issues which should only require a few lines of code, and a test or two.
-
Help wanted issues - issues which should be a bit more involved than
beginnerissues.
Further ideas might include:
- writing interfaces to additional solvers
- reporting bugs
- enhance documentation
- add unit tests
Please follow the Google Style Guide when writing your C++ Code for this project.
Submitting a pull request
Please create a pull request from your forked repo to the master branch.
- Keep pull requests small, focussing on one specific issue.
- Describe concisely what you are solving and reference the corresponding issue.
- Include weblinks to relevant information.
- Include screenshots and animated GIFs in your pull request whenever possible.
We are performing automatic pull request testing, so if you see anything red, please read through the log and update your pull request until the tests pass.
Repository Summary
| Checkout URI | https://github.com/ethz-adrl/ifopt.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-03-21 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ifopt | 2.1.4 |
README
![]()
![]()
![]()
![]()
A modern, light-weight, [Eigen]-based C++ interface to Nonlinear Programming solvers, such as [Ipopt] and [Snopt].
An example nonlinear optimization problem to solve is defined as:
- To see how this problem is formulated, see test_vars_constr_cost.h.
- Afterwards the problem can be solved using e.g. Ipopt as shown in ex_test_ipopt.cc.
</br>
Features • Install • Examples • Contribute • Publications • Authors
Features
Combines the advantages of [Ipopt] / [Snopt] and [Eigen]:
| [Ipopt] / [Snopt] | [Eigen] |
|---|---|
| :heavy_check_mark: high-quality solvers for nonlinear optimization | :heavy_check_mark: modern, intuitive formulations of vectors and matrices |
| :x: C++ API inconvenient and error-prone (raw pointers, index management, jacobian construction) | :heavy_check_mark: highly efficient implementations |
| :x: linking and exporting difficult |
- Solver independent formulation of variables and constraints with Eigen (highly efficient)
- Automatic index management by formulation of variable- and constraint-sets
- Integration: pure cmake
find_package(ifopt)or [catkin]/[ROS] (optional) - light-weight (~2k lines of code) makes it easy to use and extend
</br>
An optimization problem consists of multiple independent variable- and constraint-sets. Each set represents a common concept, e.g. a set of variables might represents spline coefficients, another footstep positions. Similarly, a constraint-set groups similar constraints together. ifopt allows users to define each of these sets independently in separate classes and then builds the overall problem from these sets. (No more worrying adapting indices when adding or removing sets).
</br>
find x0, x1 (variable-sets 0 & 1)
s.t
x0_lower <= x0 <= x0_upper (bounds on variable-set x0 \in R^2)
{x0,x1} = arg min c0(x0,x1)+c1(x0,x1) (cost-terms 0 and 1)
g0_lower < g0(x0,x1) < g0_upper (constraint-set 0 \in R^2)
g1_lower < g1(x0,x1) < g0_upper (constraint-set 1 \in R^1)
</br>
Supplying derivative information greatly increases solution speed. ifopt allows to define the derivative of each cost-term/constraint-set with respect to each variable-set independently. This ensures that when the order of variable-sets changes in the overall vector, this derivative information is still valid. These “Jacobian blocks” must be supplied through ConstraintSet::FillJacobianBlock() and are then used to build the complete Jacobian for the cost and constraints.
</br>
A graphical overview as UML can be seen here.
Install
The easiest way to install is through the ROS binaries and you’re all set!
sudo apt-get install ros-<distro>-ifopt
Install dependencies
In case you don’t use ROS or the binaries don’t exist for your distro, you can easily build these packages from source. For this, install the required dependencies [Cmake], [Eigen] and [Ipopt] using
sudo apt-get install cmake libeigen3-dev coinor-libipopt-dev
If you want to link to a local installation of [Ipopt] or to [Snopt], see here.
Build with cmake
- Install
git clone https://github.com/ethz-adrl/ifopt.git && cd ifopt
mkdir build && cd build
cmake ..
make
sudo make install # copies files in this folder to /usr/local/*
# sudo xargs rm < install_manifest.txt # in case you want to uninstall the above
File truncated at 100 lines see the full file
CONTRIBUTING
Contributing to ifopt
:+1::tada: First off, thanks for taking the time to contribute! :tada::+1:
We are grateful to anyone who decides to actively engage in this project. This project and everyone participating in it is governed by the Code of Conduct. By participating, you are expected to uphold this code.
Question or Issue?
-
ROS Answers: If you want to ask a general usage question, please do this at ROS Answers using the tag
ifopt. Asking there has the following advantages:- There are many more people reading questions there so your chances on getting an answer and in a timely manner are much higher.
- In the future other users will search there for similar problems and can find your question and the potential answers.
-
Issue tracker: In case you want to report bugs, request features or closely related to the code, the Issue tracker in this repo is the way to go.
How Can I Contribute?
Unsure where to begin contributing to ifopt? You can start by looking through these beginner and help-wanted issues:
- Good first issues - issues which should only require a few lines of code, and a test or two.
-
Help wanted issues - issues which should be a bit more involved than
beginnerissues.
Further ideas might include:
- writing interfaces to additional solvers
- reporting bugs
- enhance documentation
- add unit tests
Please follow the Google Style Guide when writing your C++ Code for this project.
Submitting a pull request
Please create a pull request from your forked repo to the master branch.
- Keep pull requests small, focussing on one specific issue.
- Describe concisely what you are solving and reference the corresponding issue.
- Include weblinks to relevant information.
- Include screenshots and animated GIFs in your pull request whenever possible.
We are performing automatic pull request testing, so if you see anything red, please read through the log and update your pull request until the tests pass.