
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
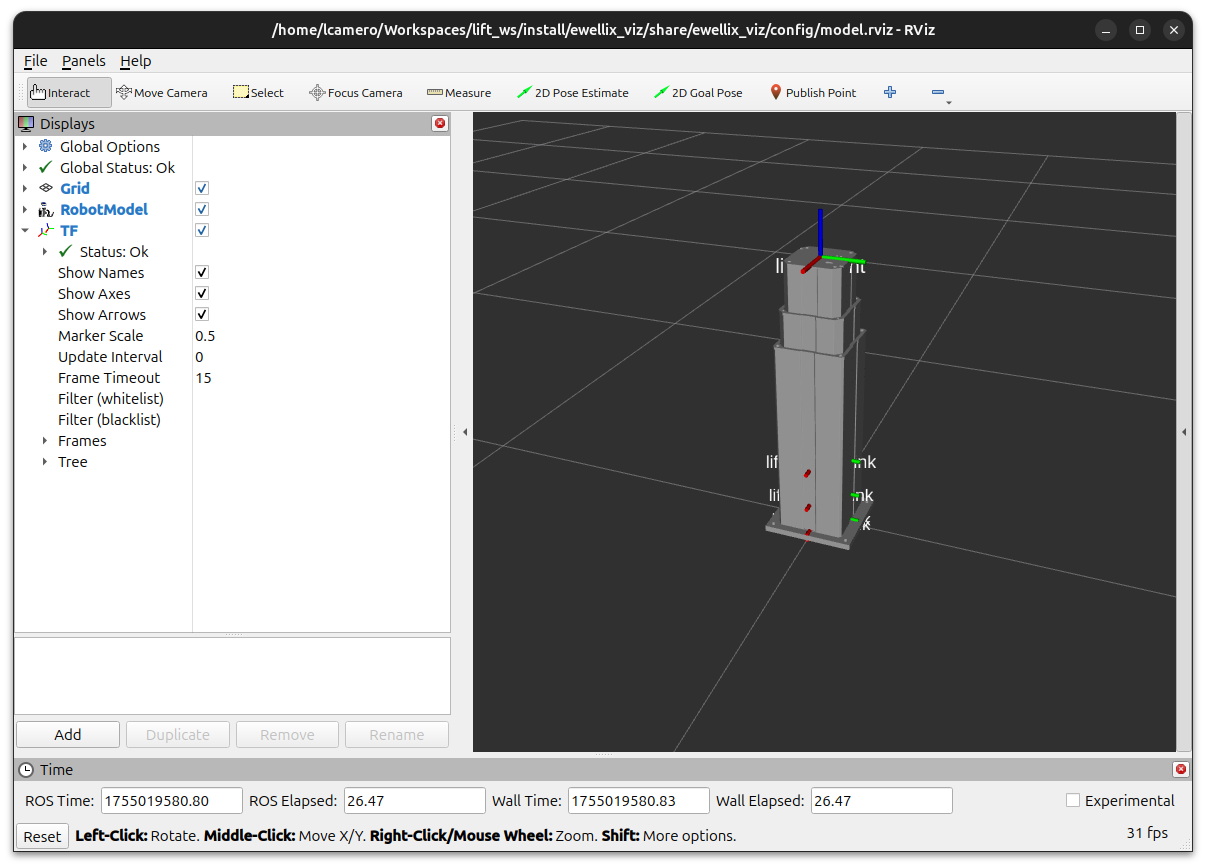
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
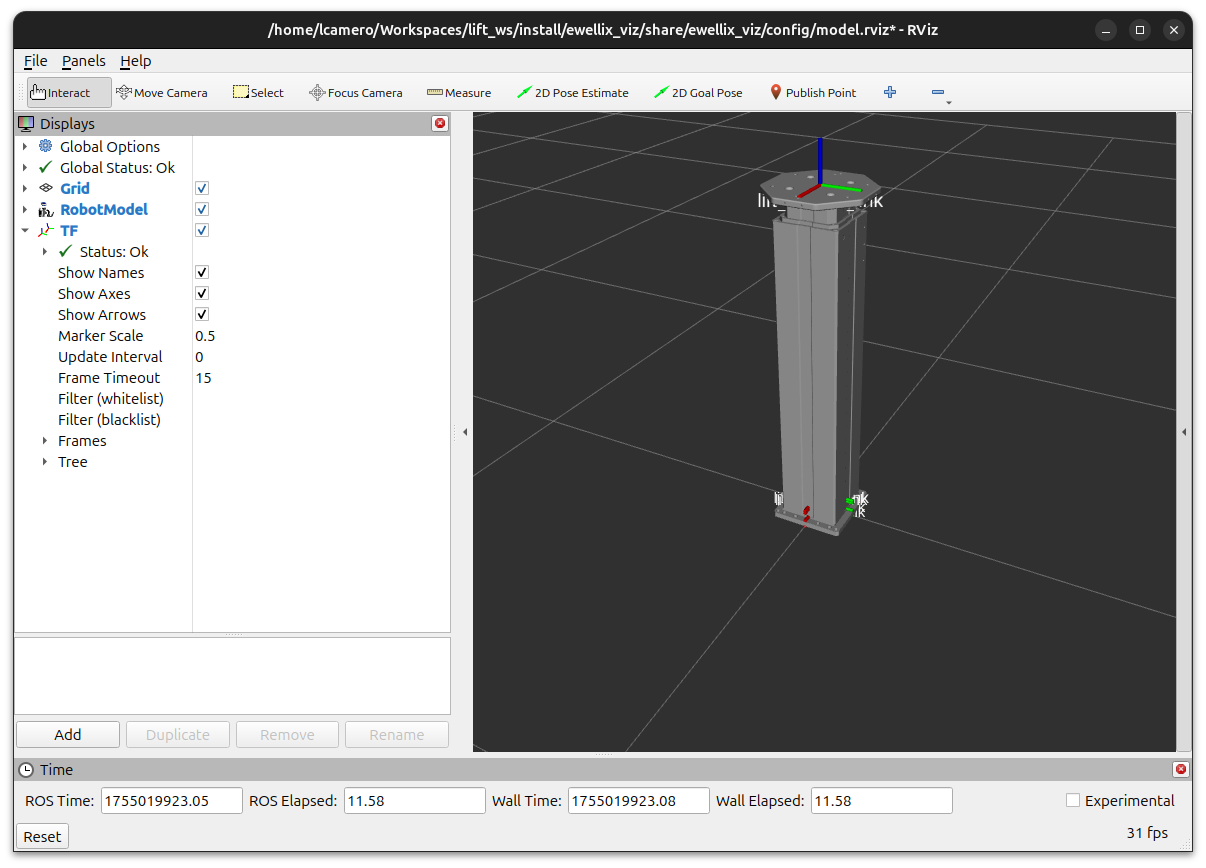
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
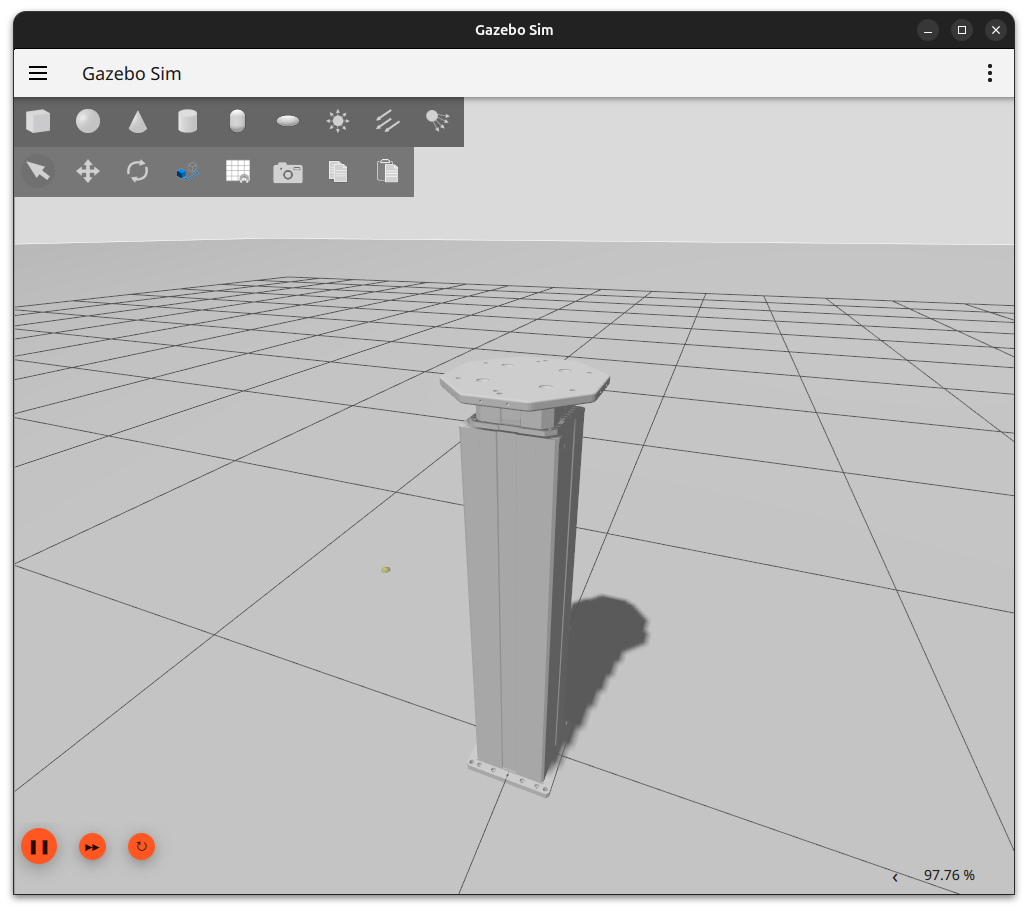
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2026-03-04 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.2.1 |
| ewellix_interfaces | 0.2.1 |
| ewellix_lift_common | 0.2.1 |
| ewellix_moveit_config | 0.2.1 |
| ewellix_sim | 0.2.1 |
| ewellix_viz | 0.2.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.

Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.

ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:

ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:

|

|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:

|

|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.

ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
ewellix_lift_common repositoryewellix_description ewellix_interfaces ewellix_lift_common ewellix_moveit_config ewellix_sim ewellix_viz |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/clearpathrobotics/ewellix_lift_common.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-03-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ewellix_description | 0.1.1 |
| ewellix_interfaces | 0.1.1 |
| ewellix_lift_common | 0.1.1 |
| ewellix_moveit_config | 0.1.1 |
| ewellix_sim | 0.1.1 |
| ewellix_viz | 0.1.1 |
README
Ewellix Common Packages
ROS2 description, MoveIt configuration, and interface packages for the Ewellix TLT lifts.
Ewellix Driver Package
See the Ewellix driver repository for more information on commanding a real lift through ROS.
Ewellix Visualization
The ewellix_viz package provides a launch file to load the URDF using specific lift parameters and display it in RViz.
By default, the tlt_x25 lift is used. This lift has a 500 mm stroke, but has a taller base than the tlt_x15 that provides less torque.
ros2 launch ewellix_viz rviz_model.launch.py
Lift Parameters
To switch to a different lift type, pass in a different configuration file using the lift_parameters launch parameter. For example, the Ewellix UR 620 designed to mount UR manipulators can be selected as follows:
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml
Change the
/path/to/path prefix with the path to theur_620.yamlin theewellix_descriptionpackage
Base Plate
It is also possible to the move the base plate and mounting plate from the model.
To remove the base plate, use the add_plate launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_plate:=false
Mounting Plate
To remove the mounting plate, use the add_mount launch argument:
|
|
|
ros2 launch ewellix_viz rviz_model.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=false
Ewellix Simulation
The simulation requires Gazebo installed from the ROS vendor packages. Use rosdep to install the dependencies on the ewellix_sim package.
Use the same parameters from the Ewellix Visualization section to select a lift type, then launch the simulation from the ewellix_sim package launch file.
ros2 launch ewellix_sim simulation.launch.py lift_parameters:=/path/to/ewellix_description/config/ur_620.yaml add_mount:=true add_plate:=true
Simulation without MoveIt!
By default, the controller loaded to the simulated ROS 2 control plugin is the JointGroupPositionController using the jpc.yaml. This controller allows the desired position of the lift to be set directly by the user through the /lift_position_controller/commands topic.
After starting the simulation, use the following command to set the height of the lift:
File truncated at 100 lines see the full file