
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World

This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 |  |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 |  |
| aws_robomaker_warehouse_DeskC_01 |  |
| aws_robomaker_warehouse_GroundB_01 | 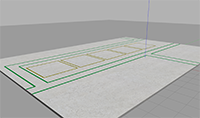 |
| aws_robomaker_warehouse_TrashCanC_01 |  |
| aws_robomaker_warehouse_Lamp_01 | 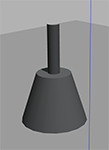 |
| aws_robomaker_warehouse_PalletJackB_01 |  |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 |  |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged aws_robomaker_small_warehouse_world at Robotics Stack Exchange
|
|
aws_robomaker_small_warehouse_world package from aws-robomaker-small-warehouse-world repoaws_robomaker_small_warehouse_world |
ROS Distro
|
Package Summary
| Version | 1.0.5 |
| License | MIT-0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2021-12-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- AWS RoboMaker
Authors
- AWS RoboMaker
AWS RoboMaker Small Warehouse World
This Gazebo world is well suited for organizations who are building and testing robot applications for warehouse and logistics use cases.
3D Models included in this Gazebo World
| Model (/models) | Picture |
|---|---|
| aws_robomaker_warehouse_Bucket_01 | |
| aws_robomaker_warehouse_ClutteringA_01, aws_robomaker_warehouse_ClutteringC_01, aws_robomaker_warehouse_ClutteringD_01 | |
| aws_robomaker_warehouse_DeskC_01 | |
| aws_robomaker_warehouse_GroundB_01 | |
| aws_robomaker_warehouse_TrashCanC_01 | |
| aws_robomaker_warehouse_Lamp_01 | |
| aws_robomaker_warehouse_PalletJackB_01 | |
| aws_robomaker_warehouse_ShelfD_01, aws_robomaker_warehouse_ShelfE_01, aws_robomaker_warehouse_ShelfF_01 | |
Building and Launching the Gazebo World with your ROS Applications
- Create or update a .rosinstall file in the root directory of your ROS workspace. Add the following line to .rosintall:
- git: {local-name: src/aws-robomaker-small-warehouse-world, uri: 'https://github.com/aws-robotics/aws-robomaker-small-warehouse-world.git', version: ros2}
-
Change the directory to your ROS workspace and run
rosws update -
Add the following include to the ROS2 launch file you are using:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
warehouse_pkg_dir = get_package_share_directory('aws_robomaker_small_warehouse_world')
warehouse_launch_path = os.path.join(warehouse_pkg_dir, 'launch')
warehouse_world_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource([warehouse_launch_path, '/small_warehouse.launch.py'])
)
ld = LaunchDescription()
ld.add_action(warehouse_world_cmd)
return ld
- Build your application using
colcon
rosws update
rosdep install --from-paths . --ignore-src -r -y
colcon build
Example: Running this world directly in Gazebo without a ROS application
To open this world in Gazebo, change the directory to your ROS workspace root folder and run:
export GAZEBO_MODEL_PATH=`pwd`/models
gazebo worlds/small_warehouse/small_warehouse.world
Example: Running this world directly using ROS without a simulated robot
To launch this base Gazebo world without a robot, clone this repository and run the following commands. Note: ROS and gazebo must already be installed on the host.
# build for ROS2
rosdep install --from-paths . --ignore-src -r -y
colcon build
# run in ROS2
source install/setup.sh
ros2 launch aws_robomaker_small_warehouse_world small_warehouse.launch.py
Visit the AWS RoboMaker website to learn more about building intelligent robotic applications with Amazon Web Services.
Notes
- Lighting might vary on different system(s) (e.g brighter on system without CPU and darker on system with GPU)
- Adjust lighting parameters in .world file as you need
Changelog for package aws_robomaker_small_warehouse_world
Forthcoming
- Use floor friction value from Gazebo empty world (#13)
- ROS2 branch
- Adding gazebo model path to stop requiring modification of gazebo model path env var (#11)
- Merge pull request #5 from RoverRobotics-forks/foxy-devel Foxy devel
- fixing missing gazebo path exports not covered in env_hooks
- Merge branch 'foxy-devel' of https://github.com/aws-robotics/aws-robomaker-small-warehouse-world into foxy-devel
- merging with branch PR #5. Also updated readme
- updated for merge request #2
- updated cmake according to review
- Tuning lighting for system(s) with/without GPU
(#2)
(#6)
- Adjust ceiling lamp's parameters so that it works system(s) with/without GPU
- update to ament_cmake and added env-hooks
- Add support for launching in ROS2 foxy
- Add support for launch with ROS2
- Merge pull request #1 from konduri/no-roof-warehouse warehouse world with no roof
- no roof world and launch
- Add initial package contents
- Initial commit
- Contributors: Amazon GitHub Automation, Anson Wong, Hai Quang, Kim (kenvink), Joep Tool, Matthew Murphy, Ojas Joshi, Sam Gundry, Steve Macenski, konduri, padiln, root
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| gazebo_plugins | |
| gazebo_ros |
System Dependencies
| Name |
|---|
| gazebo |