
|
crane_x7_examples package from crane_x7 repocrane_x7 crane_x7_bringup crane_x7_control crane_x7_examples crane_x7_gazebo crane_x7_moveit_config crane_x7_msgs |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/crane_x7_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-29 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Hiroyuki Nomura
crane_x7_examples
This package includes examples to control CRANE-X7 using crane_x7_ros.
How to launch CRANE-X7 base packages
- Connect a communication cable from CRANE-X7 to a PC.
- Open terminal and launch
demo.launchofcrane_x7_bringuppackage.
This launch file has an argument to select CRANE-X7 or virtual CRANE-X7:
- fake_execution (default: true)
Using virtual CRANE-X7
Launch virtual CRANE-X7 base packages with the following command:
roslaunch crane_x7_bringup demo.launch fake_execution:=true
Using real CRANE-X7
Launch the base packages with the following command:
roslaunch crane_x7_bringup demo.launch fake_execution:=false
Default serial port name is /dev/ttyUSB0.
To change port name (e.g. /dev/ttyUSB1), launch the packages with arguments:
roslaunch crane_x7_bringup demo.launch fake_execution:=false port:=/dev/ttyUSB1
Using Gazebo simulator
Launch the packages with the following command:
roslaunch crane_x7_gazebo crane_x7_with_table.launch
Run Examples
Following examples will be executable after launch CRANE-X7 base packages.
- gripper_action_example
- pose_groupstate_example
- joint_values_example
- cartesian_path_example
- crane_x7_pick_and_place_demo
- preset_pid_gain_example
- teaching_example
- joystick_example
- obstacle_avoidance_example
- servo_info_example
- pick_and_place_in_gazebo_example
gripper_action_example
This is an example to open/close the gripper.
Run a node with the following command:
rosrun crane_x7_examples gripper_action_example.py
pose_groupstate_example
This is an example using group_state of SRDF.
CRANE-X7 changes its posture to home and vertical listed in SRDF file crane_x7_moveit_config/config/crane_x7.srdf.
Run a node with the following command:
rosrun crane_x7_examples pose_groupstate_example.py
joint_values_example
This is an example to change each joint values of arm one by one using moveit_commander.
Run a node with the following command:
rosrun crane_x7_examples joint_values_example.py
cartesian_path_example
This is an example to plan a circular path that the hand follows using moveit_commander and
Cartesian Path.
Run a node with the following command:
rosrun crane_x7_examples cartesian_path_example.py
Videos
crane_x7_pick_and_place_demo
This is an example to grasp, pick up, carry and place an small object.
Run a node with the following command:
rosrun crane_x7_examples crane_x7_pick_and_place_demo.py
Real environment setup
Place the small object at a distance of 20 cm from CRANE-X7.
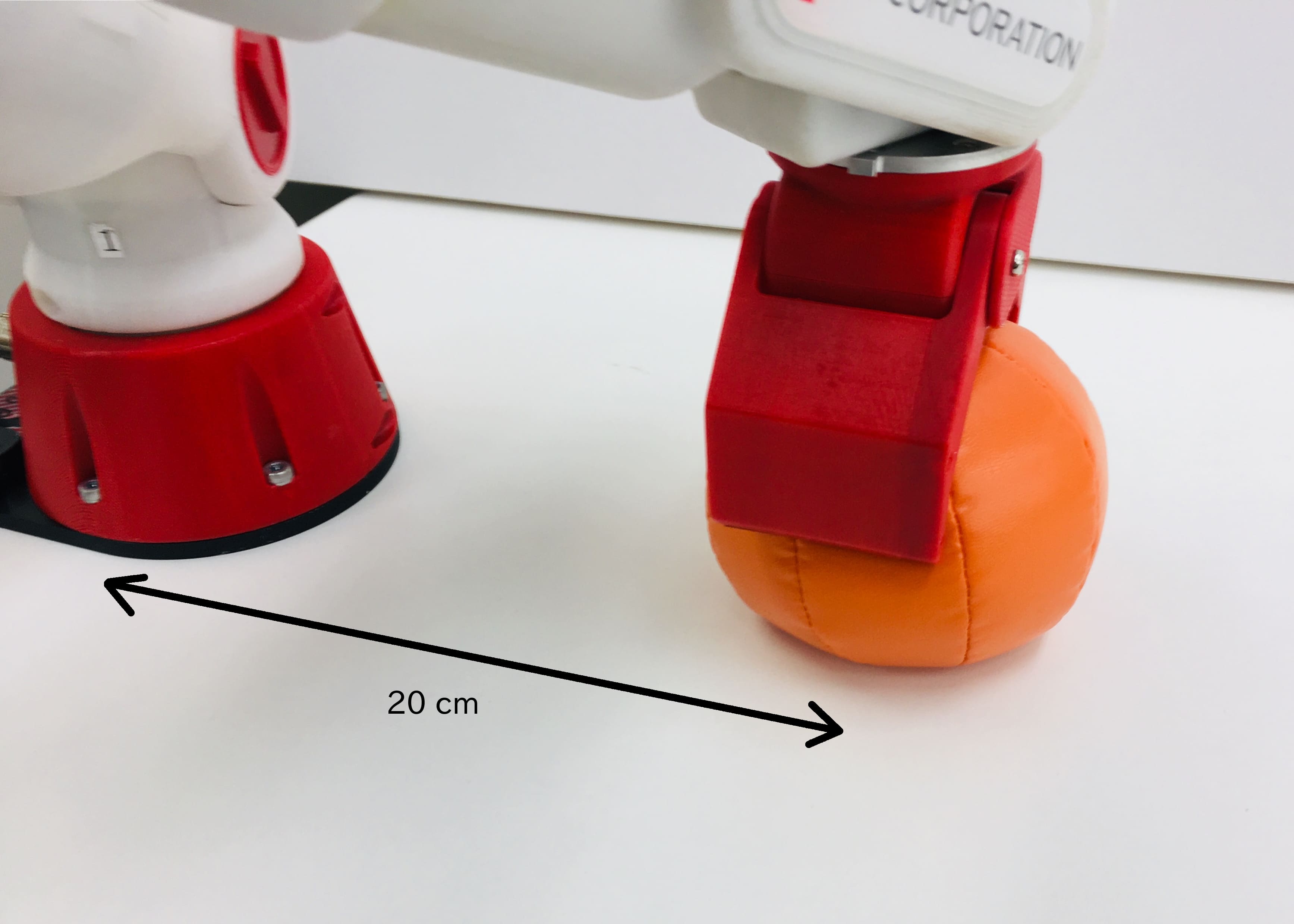
This orange ball can be purchased at this page in RT ROBOT SHOP.
Videos

preset_pid_gain_example
This is an example to change PID gains of servo motors in bulk using preset_reconfigure of crane_x7_control.
Lists of PID gain preset values can be edited in crane_x7_control/scripts/preset_reconfigure.py.
Launch nodes preset_reconfigure.py and preset_pid_gain_example.py with the following command:
roslaunch crane_x7_examples preset_pid_gain_example.launch
Videos

teaching_example
This is an example to generate an motion trajectory with direct teaching.
User can operate CRANE-X7 directly because the PID gains of servo motors will be small values.
Launch nodes with the following command:
roslaunch crane_x7_examples teaching_example.launch
Please see below for keyboard operation.
Teaching Mode
This is a mode at startup and the PID gains will be small values.
| Key | Function |
|---|---|
| s / S | Save current posture |
| d / D | Delete all posture data |
| m / M | Transition to Action **Mode |
| q / Q | Quit application |
Action Mode
This is a mode transitioned from Teaching Mode and the PID gains will return to normal values.
| Key | Function |
|---|---|
| p / P | Playback a posture data |
| a / A | Playback all posture data consecutively |
| l / L | Toggle loop playback (ON/OFF) |
| m / M | Transition to Teaching **Mode |
| q / Q | Quit application |
Videos

joystick_example
This is an example to use joystick controller to change the hand position and posture, or to open and close of the gripper, or to preset the PID gains or to generate a position trajectory with direct teaching.
Connect a joystick controller to a PC and check the device /dev/input/js0 existence
then launch nodes with the following command:
for control CRANE-X7
roslaunch crane_x7_examples joystick_example.launch
for control virtual CRANE-X7
Please add an argument sim to avoid an error.
roslaunch crane_x7_examples joystick_example.launch sim:=true
Key configuration
This picture shows the default key configuration. The joystick controller is Logicool Wireless Gamepad F710.
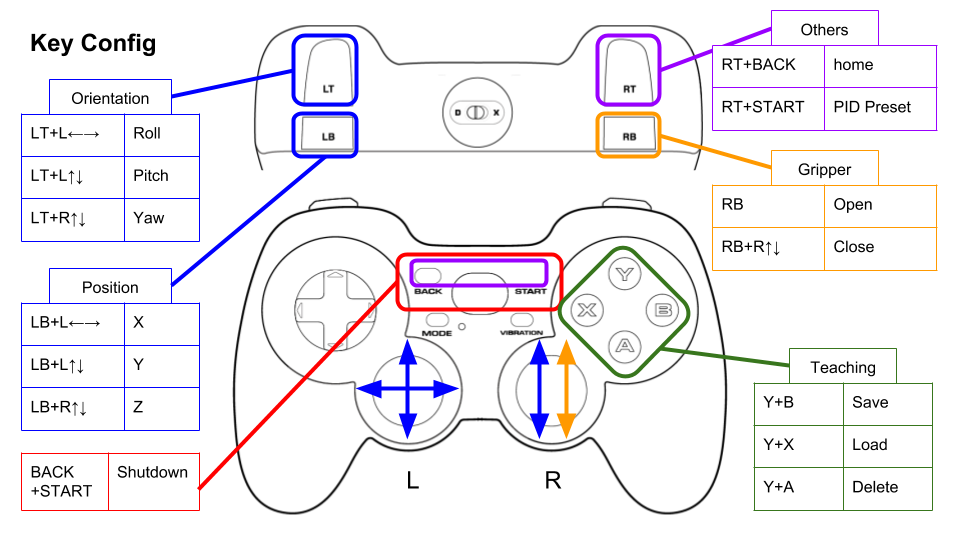
Key assignments can be edited with key numbers in crane_x7_example/launch/joystick_example.launch.
<node name="joystick_example" pkg="crane_x7_examples" type="joystick_example.py" required="true" output="screen">
<param name="button_shutdown_1" value="8" type="int" />
<param name="button_shutdown_2" value="9" type="int" />
<param name="button_name_enable" value="7" type="int" />
<param name="button_name_home" value="8" type="int" />
<param name="button_preset_enable" value="7" type="int" />
<param name="button_preset_no1" value="9" type="int" />
This picture shows the default key numbers.
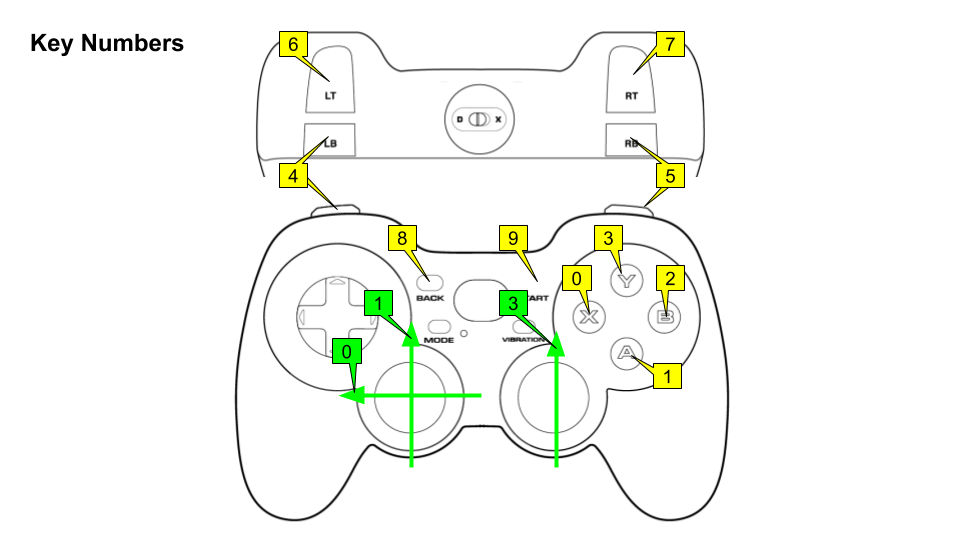
Please display /joy topic with the command rostopic echo /joy to check the default key numbers.
roslaunch crane_x7_examples joystick_example.launch sim:=true
# Enter the command in another terminal
rostopic echo /joy
# Press buttons of a joystick controller
header:
seq: 1
stamp:
secs: 1549359364
nsecs: 214800952
frame_id: ''
axes: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
buttons: [0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0]
---
Videos

obstacle_avoidance_example
This is an example to use rosservice to add dummy obstacles and to avoid the obstacles.
Launch nodes with the following command:
roslaunch crane_x7_examples obstacle_avoidance_example.launch
This example uses a service file including target posture of CRANE-X7 and size and posture of an obstacle.
These values can be edited in crane_x7_examples/scripts/obstacle_client.py.
The default obstacle shape is rectangular.
# Define obstacle shape and pose
obstacle_name = "box"
obstacle_size = Vector3(0.28, 0.16, 0.14)
obstacle_pose_stamped = PoseStamped()
obstacle_pose_stamped.header.frame_id = "/base_link"
obstacle_pose_stamped.pose.position.x = 0.35
obstacle_pose_stamped.pose.position.z = obstacle_size.z/2.0
This example generates a dummy floor as an obstacle to move safely.
If this floor is unnecessary, please comment out some lines from crane_x7_examples/scripts/obstacle_avoidance_example.py.
# Generate dummy floor
floor_name = "floor"
floor_size = (2.0, 2.0, 0.01)
floor_pose = PoseStamped()
floor_pose.header.frame_id = "/base_link"
floor_pose.pose.position.z = -floor_size[2]/2.0
scene.add_box(floor_name, floor_pose, floor_size)
rospy.sleep(SLEEP_TIME)
If MoveIt did not generate trajectory to avoid an obstacle,
CRANE-X7 will not move,
the example server will return value result=False,
then MoveIt will calculate a trajectory to next target position.
servo_info_example
This is an example to subscribe the servo motor status.
Run a node with the following command:
rosrun crane_x7_examples servo_info_example.py
This example subscribes topics of gripper joint crane_x7_gripper_finger_a_joint
and displays the servo motor current, position and temperature to a terminal.
current [mA]: 0.0 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 2.69 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 0.0 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 0.0 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 2.69 dxl_position: 2634 temp [deg C]: 42.0
...
If the motor current exceed thresholds, the gripper will open/close. This function enables user to open/close the gripper by hand.
Please refere crane_x7_control/README.md for details of the topics.
pick_and_place_in_gazebo_example
This is an example to grasp, pick up, carry and place an small object on Gazebo environments.
Launch nodes with the following command with arguments to control the gripper by EffortController.
roslaunch crane_x7_gazebo crane_x7_with_table.launch use_effort_gripper:=true
After Gazebo launch, run a node with the following command:
rosrun crane_x7_examples pick_and_place_in_gazebo_example.py
Videos
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | crane_x7_moveit_config | |
| 2 | std_msgs | |
| 2 | geometry_msgs | |
| 1 | message_generation | |
| 1 | catkin | |
| 2 | moveit_commander | |
| 1 | message_runtime | |
| 2 | joy |
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| crane_x7 | github-rt-net-crane_x7_ros |
Launch files
- launch/obstacle_avoidance_example.launch
- launch/teaching_example.launch
- launch/preset_pid_gain_example.launch
- launch/joystick_example.launch
-
- joydev [default: /dev/input/js0]
- sim [default: false]
Messages
Services
Plugins
Recent questions tagged crane_x7_examples at Robotics Stack Exchange
|
|
crane_x7_examples package from crane_x7 repocrane_x7 crane_x7_bringup crane_x7_control crane_x7_examples crane_x7_gazebo crane_x7_moveit_config crane_x7_msgs |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/crane_x7_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-29 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Hiroyuki Nomura
crane_x7_examples
This package includes examples to control CRANE-X7 using crane_x7_ros.
How to launch CRANE-X7 base packages
- Connect a communication cable from CRANE-X7 to a PC.
- Open terminal and launch
demo.launchofcrane_x7_bringuppackage.
This launch file has an argument to select CRANE-X7 or virtual CRANE-X7:
- fake_execution (default: true)
Using virtual CRANE-X7
Launch virtual CRANE-X7 base packages with the following command:
roslaunch crane_x7_bringup demo.launch fake_execution:=true
Using real CRANE-X7
Launch the base packages with the following command:
roslaunch crane_x7_bringup demo.launch fake_execution:=false
Default serial port name is /dev/ttyUSB0.
To change port name (e.g. /dev/ttyUSB1), launch the packages with arguments:
roslaunch crane_x7_bringup demo.launch fake_execution:=false port:=/dev/ttyUSB1
Using Gazebo simulator
Launch the packages with the following command:
roslaunch crane_x7_gazebo crane_x7_with_table.launch
Run Examples
Following examples will be executable after launch CRANE-X7 base packages.
- gripper_action_example
- pose_groupstate_example
- joint_values_example
- cartesian_path_example
- crane_x7_pick_and_place_demo
- preset_pid_gain_example
- teaching_example
- joystick_example
- obstacle_avoidance_example
- servo_info_example
- pick_and_place_in_gazebo_example
gripper_action_example
This is an example to open/close the gripper.
Run a node with the following command:
rosrun crane_x7_examples gripper_action_example.py
pose_groupstate_example
This is an example using group_state of SRDF.
CRANE-X7 changes its posture to home and vertical listed in SRDF file crane_x7_moveit_config/config/crane_x7.srdf.
Run a node with the following command:
rosrun crane_x7_examples pose_groupstate_example.py
joint_values_example
This is an example to change each joint values of arm one by one using moveit_commander.
Run a node with the following command:
rosrun crane_x7_examples joint_values_example.py
cartesian_path_example
This is an example to plan a circular path that the hand follows using moveit_commander and
Cartesian Path.
Run a node with the following command:
rosrun crane_x7_examples cartesian_path_example.py
Videos
crane_x7_pick_and_place_demo
This is an example to grasp, pick up, carry and place an small object.
Run a node with the following command:
rosrun crane_x7_examples crane_x7_pick_and_place_demo.py
Real environment setup
Place the small object at a distance of 20 cm from CRANE-X7.
This orange ball can be purchased at this page in RT ROBOT SHOP.
Videos
preset_pid_gain_example
This is an example to change PID gains of servo motors in bulk using preset_reconfigure of crane_x7_control.
Lists of PID gain preset values can be edited in crane_x7_control/scripts/preset_reconfigure.py.
Launch nodes preset_reconfigure.py and preset_pid_gain_example.py with the following command:
roslaunch crane_x7_examples preset_pid_gain_example.launch
Videos
teaching_example
This is an example to generate an motion trajectory with direct teaching.
User can operate CRANE-X7 directly because the PID gains of servo motors will be small values.
Launch nodes with the following command:
roslaunch crane_x7_examples teaching_example.launch
Please see below for keyboard operation.
Teaching Mode
This is a mode at startup and the PID gains will be small values.
| Key | Function |
|---|---|
| s / S | Save current posture |
| d / D | Delete all posture data |
| m / M | Transition to Action **Mode |
| q / Q | Quit application |
Action Mode
This is a mode transitioned from Teaching Mode and the PID gains will return to normal values.
| Key | Function |
|---|---|
| p / P | Playback a posture data |
| a / A | Playback all posture data consecutively |
| l / L | Toggle loop playback (ON/OFF) |
| m / M | Transition to Teaching **Mode |
| q / Q | Quit application |
Videos
joystick_example
This is an example to use joystick controller to change the hand position and posture, or to open and close of the gripper, or to preset the PID gains or to generate a position trajectory with direct teaching.
Connect a joystick controller to a PC and check the device /dev/input/js0 existence
then launch nodes with the following command:
for control CRANE-X7
roslaunch crane_x7_examples joystick_example.launch
for control virtual CRANE-X7
Please add an argument sim to avoid an error.
roslaunch crane_x7_examples joystick_example.launch sim:=true
Key configuration
This picture shows the default key configuration. The joystick controller is Logicool Wireless Gamepad F710.
Key assignments can be edited with key numbers in crane_x7_example/launch/joystick_example.launch.
<node name="joystick_example" pkg="crane_x7_examples" type="joystick_example.py" required="true" output="screen">
<param name="button_shutdown_1" value="8" type="int" />
<param name="button_shutdown_2" value="9" type="int" />
<param name="button_name_enable" value="7" type="int" />
<param name="button_name_home" value="8" type="int" />
<param name="button_preset_enable" value="7" type="int" />
<param name="button_preset_no1" value="9" type="int" />
This picture shows the default key numbers.
Please display /joy topic with the command rostopic echo /joy to check the default key numbers.
roslaunch crane_x7_examples joystick_example.launch sim:=true
# Enter the command in another terminal
rostopic echo /joy
# Press buttons of a joystick controller
header:
seq: 1
stamp:
secs: 1549359364
nsecs: 214800952
frame_id: ''
axes: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
buttons: [0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0]
---
Videos
obstacle_avoidance_example
This is an example to use rosservice to add dummy obstacles and to avoid the obstacles.
Launch nodes with the following command:
roslaunch crane_x7_examples obstacle_avoidance_example.launch
This example uses a service file including target posture of CRANE-X7 and size and posture of an obstacle.
These values can be edited in crane_x7_examples/scripts/obstacle_client.py.
The default obstacle shape is rectangular.
# Define obstacle shape and pose
obstacle_name = "box"
obstacle_size = Vector3(0.28, 0.16, 0.14)
obstacle_pose_stamped = PoseStamped()
obstacle_pose_stamped.header.frame_id = "/base_link"
obstacle_pose_stamped.pose.position.x = 0.35
obstacle_pose_stamped.pose.position.z = obstacle_size.z/2.0
This example generates a dummy floor as an obstacle to move safely.
If this floor is unnecessary, please comment out some lines from crane_x7_examples/scripts/obstacle_avoidance_example.py.
# Generate dummy floor
floor_name = "floor"
floor_size = (2.0, 2.0, 0.01)
floor_pose = PoseStamped()
floor_pose.header.frame_id = "/base_link"
floor_pose.pose.position.z = -floor_size[2]/2.0
scene.add_box(floor_name, floor_pose, floor_size)
rospy.sleep(SLEEP_TIME)
If MoveIt did not generate trajectory to avoid an obstacle,
CRANE-X7 will not move,
the example server will return value result=False,
then MoveIt will calculate a trajectory to next target position.
servo_info_example
This is an example to subscribe the servo motor status.
Run a node with the following command:
rosrun crane_x7_examples servo_info_example.py
This example subscribes topics of gripper joint crane_x7_gripper_finger_a_joint
and displays the servo motor current, position and temperature to a terminal.
current [mA]: 0.0 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 2.69 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 0.0 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 0.0 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 2.69 dxl_position: 2634 temp [deg C]: 42.0
...
If the motor current exceed thresholds, the gripper will open/close. This function enables user to open/close the gripper by hand.
Please refere crane_x7_control/README.md for details of the topics.
pick_and_place_in_gazebo_example
This is an example to grasp, pick up, carry and place an small object on Gazebo environments.
Launch nodes with the following command with arguments to control the gripper by EffortController.
roslaunch crane_x7_gazebo crane_x7_with_table.launch use_effort_gripper:=true
After Gazebo launch, run a node with the following command:
rosrun crane_x7_examples pick_and_place_in_gazebo_example.py
Videos
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | crane_x7_moveit_config | |
| 2 | std_msgs | |
| 2 | geometry_msgs | |
| 1 | message_generation | |
| 1 | catkin | |
| 2 | moveit_commander | |
| 1 | message_runtime | |
| 2 | joy |
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| crane_x7 | github-rt-net-crane_x7_ros |
Launch files
- launch/obstacle_avoidance_example.launch
- launch/teaching_example.launch
- launch/preset_pid_gain_example.launch
- launch/joystick_example.launch
-
- joydev [default: /dev/input/js0]
- sim [default: false]
Messages
Services
Plugins
Recent questions tagged crane_x7_examples at Robotics Stack Exchange
|
|
crane_x7_examples package from crane_x7 repocrane_x7 crane_x7_bringup crane_x7_control crane_x7_examples crane_x7_gazebo crane_x7_moveit_config crane_x7_msgs |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.0.0 |
| License | Apache License 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/crane_x7_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-09-29 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Daisuke Sato
- Hiroyuki Nomura
crane_x7_examples
This package includes examples to control CRANE-X7 using crane_x7_ros.
How to launch CRANE-X7 base packages
- Connect a communication cable from CRANE-X7 to a PC.
- Open terminal and launch
demo.launchofcrane_x7_bringuppackage.
This launch file has an argument to select CRANE-X7 or virtual CRANE-X7:
- fake_execution (default: true)
Using virtual CRANE-X7
Launch virtual CRANE-X7 base packages with the following command:
roslaunch crane_x7_bringup demo.launch fake_execution:=true
Using real CRANE-X7
Launch the base packages with the following command:
roslaunch crane_x7_bringup demo.launch fake_execution:=false
Default serial port name is /dev/ttyUSB0.
To change port name (e.g. /dev/ttyUSB1), launch the packages with arguments:
roslaunch crane_x7_bringup demo.launch fake_execution:=false port:=/dev/ttyUSB1
Using Gazebo simulator
Launch the packages with the following command:
roslaunch crane_x7_gazebo crane_x7_with_table.launch
Run Examples
Following examples will be executable after launch CRANE-X7 base packages.
- gripper_action_example
- pose_groupstate_example
- joint_values_example
- cartesian_path_example
- crane_x7_pick_and_place_demo
- preset_pid_gain_example
- teaching_example
- joystick_example
- obstacle_avoidance_example
- servo_info_example
- pick_and_place_in_gazebo_example
gripper_action_example
This is an example to open/close the gripper.
Run a node with the following command:
rosrun crane_x7_examples gripper_action_example.py
pose_groupstate_example
This is an example using group_state of SRDF.
CRANE-X7 changes its posture to home and vertical listed in SRDF file crane_x7_moveit_config/config/crane_x7.srdf.
Run a node with the following command:
rosrun crane_x7_examples pose_groupstate_example.py
joint_values_example
This is an example to change each joint values of arm one by one using moveit_commander.
Run a node with the following command:
rosrun crane_x7_examples joint_values_example.py
cartesian_path_example
This is an example to plan a circular path that the hand follows using moveit_commander and
Cartesian Path.
Run a node with the following command:
rosrun crane_x7_examples cartesian_path_example.py
Videos
crane_x7_pick_and_place_demo
This is an example to grasp, pick up, carry and place an small object.
Run a node with the following command:
rosrun crane_x7_examples crane_x7_pick_and_place_demo.py
Real environment setup
Place the small object at a distance of 20 cm from CRANE-X7.
This orange ball can be purchased at this page in RT ROBOT SHOP.
Videos
preset_pid_gain_example
This is an example to change PID gains of servo motors in bulk using preset_reconfigure of crane_x7_control.
Lists of PID gain preset values can be edited in crane_x7_control/scripts/preset_reconfigure.py.
Launch nodes preset_reconfigure.py and preset_pid_gain_example.py with the following command:
roslaunch crane_x7_examples preset_pid_gain_example.launch
Videos
teaching_example
This is an example to generate an motion trajectory with direct teaching.
User can operate CRANE-X7 directly because the PID gains of servo motors will be small values.
Launch nodes with the following command:
roslaunch crane_x7_examples teaching_example.launch
Please see below for keyboard operation.
Teaching Mode
This is a mode at startup and the PID gains will be small values.
| Key | Function |
|---|---|
| s / S | Save current posture |
| d / D | Delete all posture data |
| m / M | Transition to Action **Mode |
| q / Q | Quit application |
Action Mode
This is a mode transitioned from Teaching Mode and the PID gains will return to normal values.
| Key | Function |
|---|---|
| p / P | Playback a posture data |
| a / A | Playback all posture data consecutively |
| l / L | Toggle loop playback (ON/OFF) |
| m / M | Transition to Teaching **Mode |
| q / Q | Quit application |
Videos
joystick_example
This is an example to use joystick controller to change the hand position and posture, or to open and close of the gripper, or to preset the PID gains or to generate a position trajectory with direct teaching.
Connect a joystick controller to a PC and check the device /dev/input/js0 existence
then launch nodes with the following command:
for control CRANE-X7
roslaunch crane_x7_examples joystick_example.launch
for control virtual CRANE-X7
Please add an argument sim to avoid an error.
roslaunch crane_x7_examples joystick_example.launch sim:=true
Key configuration
This picture shows the default key configuration. The joystick controller is Logicool Wireless Gamepad F710.
Key assignments can be edited with key numbers in crane_x7_example/launch/joystick_example.launch.
<node name="joystick_example" pkg="crane_x7_examples" type="joystick_example.py" required="true" output="screen">
<param name="button_shutdown_1" value="8" type="int" />
<param name="button_shutdown_2" value="9" type="int" />
<param name="button_name_enable" value="7" type="int" />
<param name="button_name_home" value="8" type="int" />
<param name="button_preset_enable" value="7" type="int" />
<param name="button_preset_no1" value="9" type="int" />
This picture shows the default key numbers.
Please display /joy topic with the command rostopic echo /joy to check the default key numbers.
roslaunch crane_x7_examples joystick_example.launch sim:=true
# Enter the command in another terminal
rostopic echo /joy
# Press buttons of a joystick controller
header:
seq: 1
stamp:
secs: 1549359364
nsecs: 214800952
frame_id: ''
axes: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
buttons: [0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0]
---
Videos
obstacle_avoidance_example
This is an example to use rosservice to add dummy obstacles and to avoid the obstacles.
Launch nodes with the following command:
roslaunch crane_x7_examples obstacle_avoidance_example.launch
This example uses a service file including target posture of CRANE-X7 and size and posture of an obstacle.
These values can be edited in crane_x7_examples/scripts/obstacle_client.py.
The default obstacle shape is rectangular.
# Define obstacle shape and pose
obstacle_name = "box"
obstacle_size = Vector3(0.28, 0.16, 0.14)
obstacle_pose_stamped = PoseStamped()
obstacle_pose_stamped.header.frame_id = "/base_link"
obstacle_pose_stamped.pose.position.x = 0.35
obstacle_pose_stamped.pose.position.z = obstacle_size.z/2.0
This example generates a dummy floor as an obstacle to move safely.
If this floor is unnecessary, please comment out some lines from crane_x7_examples/scripts/obstacle_avoidance_example.py.
# Generate dummy floor
floor_name = "floor"
floor_size = (2.0, 2.0, 0.01)
floor_pose = PoseStamped()
floor_pose.header.frame_id = "/base_link"
floor_pose.pose.position.z = -floor_size[2]/2.0
scene.add_box(floor_name, floor_pose, floor_size)
rospy.sleep(SLEEP_TIME)
If MoveIt did not generate trajectory to avoid an obstacle,
CRANE-X7 will not move,
the example server will return value result=False,
then MoveIt will calculate a trajectory to next target position.
servo_info_example
This is an example to subscribe the servo motor status.
Run a node with the following command:
rosrun crane_x7_examples servo_info_example.py
This example subscribes topics of gripper joint crane_x7_gripper_finger_a_joint
and displays the servo motor current, position and temperature to a terminal.
current [mA]: 0.0 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 2.69 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 0.0 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 0.0 dxl_position: 2634 temp [deg C]: 42.0
current [mA]: 2.69 dxl_position: 2634 temp [deg C]: 42.0
...
If the motor current exceed thresholds, the gripper will open/close. This function enables user to open/close the gripper by hand.
Please refere crane_x7_control/README.md for details of the topics.
pick_and_place_in_gazebo_example
This is an example to grasp, pick up, carry and place an small object on Gazebo environments.
Launch nodes with the following command with arguments to control the gripper by EffortController.
roslaunch crane_x7_gazebo crane_x7_with_table.launch use_effort_gripper:=true
After Gazebo launch, run a node with the following command:
rosrun crane_x7_examples pick_and_place_in_gazebo_example.py
Videos
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | crane_x7_moveit_config | |
| 2 | std_msgs | |
| 2 | geometry_msgs | |
| 1 | message_generation | |
| 1 | catkin | |
| 2 | moveit_commander | |
| 1 | message_runtime | |
| 2 | joy |
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| crane_x7 | github-rt-net-crane_x7_ros |
Launch files
- launch/obstacle_avoidance_example.launch
- launch/teaching_example.launch
- launch/preset_pid_gain_example.launch
- launch/joystick_example.launch
-
- joydev [default: /dev/input/js0]
- sim [default: false]